石油工程車防碰撞預警多少錢
佳興偉誠的礦用自卸車防碰撞系統,是礦山運輸安全的堅實后盾。礦山環境惡劣,粉塵多、視線差,自卸車體型龐大,轉彎和倒車時極易引發碰撞。該系統搭載多組高抗干擾毫米波雷達,分別安裝在車頭、車身兩側及車尾,能準確探測 50 米范圍內的其他礦車、巖壁、渣堆等目標。當兩車距離小于安全閾值時,駕駛室內的顯示屏會實時顯示目標方位和距離,同時發出 “請注意前方車輛”“右側有障礙物” 等語音預警,聲光報警器也會相應閃爍。即使在暴雨、濃霧等極端天氣下,系統仍能穩定工作,通過算法過濾粉塵干擾,為礦用自卸車筑起一道全天候的安全防線,大幅降低礦山運輸事故率。大型車輛防碰撞預警系統采用高清攝像頭,能清晰捕捉車輛周圍圖像,為司機提供更直觀的視覺預警。石油工程車防碰撞預警多少錢
在礦山上,礦車作業環境惡劣,前車行駛過程中帶起的灰塵很容易使后車視野受到遮擋,從而發生車輛碰撞等危險事故,佳興偉誠車輛前向道路防碰撞預警輔助系統可以很好的解決這一痛點,從而大幅度的提升礦車作業安全系數。佳興偉誠車輛前向道路防碰撞輔助系統由車距顯示器、毫米波雷達、聲光報警器組成,通過安裝在車頭下方中間的毫米波雷達來測量與前車的距離,當與前車車距過近時,聲光報警器會進行語音提醒駕駛員,并在駕駛室內部安裝的顯示器上看到與前車的距離,從而避免危險事故的發生。內蒙古特種車盲區防碰撞預警定制工程車前向防碰撞預警系統,通過毫米波雷達實時監測車前環境。
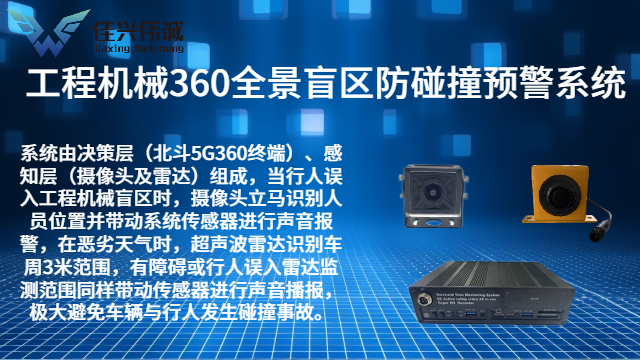
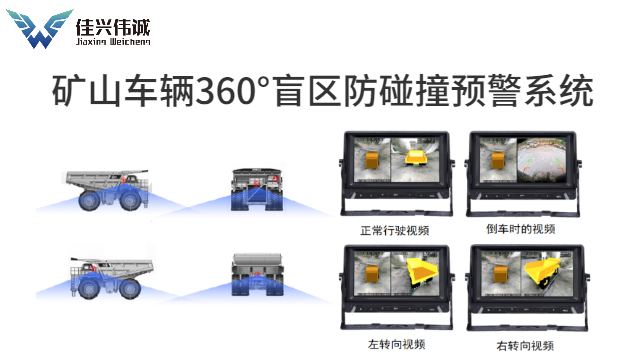
工程車輛盲區視覺 360 防碰撞預警系統是專為挖掘機、裝載機等大型工程車輛設計的安全輔助系統,通過多維度視覺感知與智能算法,實時監測車輛周圍盲區的人員、障礙物等潛在危險,以聲光報警、圖像顯示等方式提醒駕駛員,減少碰撞事故。?系統由感知層、處理層和預警層構成。感知層含 4-6 個超廣角高清攝像頭,覆蓋 3-10 米盲區,支持夜視和 IP6K9K 級防水防塵,還可搭配雷達應對惡劣天氣;處理層運用圖像拼接、目標檢測與追蹤算法及危險等級評估技術;預警層通過車載顯示屏和內外聲光裝置實現預警。?其技術優勢在于盲區覆蓋率超 90%,AI 算法能快速識別目標減少誤報,且響應延遲<200ms。典型應用場景包括建筑施工場地、礦山、市政工程、港口與物流園區等。該系統能降低 60%-80% 的盲區事故率,滿足相關合規要求,還能提高作業效率。
隨著我國經濟迅速發展的同時,工程車行業也隨之帶動起來,但工程車行業發展的同時,各種事情也隨之而來;工程車駕駛位高,車身過長造成視野受限盲區過大,所以在程車作業時很難注意周圍的情況,這時若有人員闖入那將造成不可避免的危險事故,佳興偉誠科技就工程車盲區事故研發出工程車四路BSD盲區防碰撞預警系統,該系統在工程車前后左右各安裝一個AI智能攝像頭來采集車周圍的數據通過主機的算法處理在中控屏上呈現出一個四分割的視頻畫面,司機可以清楚地看到車周的情況,當工程車在作業時有人闖到車輛周圍,AI攝像頭會立即捕捉人員并在中控屏上圈出人的位置,同時聲光報警器會播報“大車危險,請遠離”,這樣能極大的避免因工程車作業時盲區有違規人員闖入而造成危險事故。依靠超聲波傳感器的工程車防碰撞預警系統,可準確探測車輛盲區,讓司機提前知曉潛在危險,規避碰撞。

由于工程車屬于大型車輛,具有車身長,駕駛位置高,軸距大等特點,車身周圍存在大片視覺盲區。工程車在作業過程中,單憑駕駛員視覺操作,那這些由車身引起的盲區就極大發生危險事故,在調查過程中顯示,很多事故造成大多是因為,周邊車輛人員不知不覺走進工程車盲區范圍內駕駛員看不到而引發,為此佳興偉誠科技研發出工程車四路BSD盲區防碰撞預警系統。工程車四路BSD盲區防碰撞預警系統,通過在工程車車身周圍各加裝一個BSD盲區偵測攝像頭來監測車身周圍的環境,經過算法處理在司機駕駛室內中控屏上呈現出一個四分割畫面,司機可以清楚地看到工程車車身周邊情況,完美的解決因工程車盲區問題。當工程車在作業時,車身周邊作業范圍闖入車輛或人員,攝像頭會立即捕捉闖入人員或車輛的位置,上報給主機,主機聯動聲光報警器立即播報“您已進入危險區域,請立即遠離”,司機也可以在中控屏上清晰看到闖入人員或車輛位置,避免操作不當而造成危險事故。工程車前向防碰撞預警系統,助力每次作業安全。伊春防碰撞預警定制設計
礦山車輛前向防碰撞預警系統怎么樣?石油工程車防碰撞預警多少錢
在礦山作業中,車輛運輸對生產流程順暢至關重要,但礦山路況復雜、車輛多,且灰塵多、視線差,車輛碰撞事故風險高。為此,佳興偉誠推出礦山車輛前后防碰撞預警系統,為礦山運輸安全提供可靠技術保障。?該系統采用先進的傳感器融合技術,集成毫米波雷達與高精度傳感器。毫米波雷達能全天候工作,不受惡劣天氣和光線影響,準確測量車輛前后方障礙物或其他車輛的距離、速度和角度;攝像頭通過圖像識別對監測區域物體分類識別。再經傳感器融合算法深度融合兩者數據,實現對車輛周邊環境的準確感知。?同時,系統運用深度學習和人工智能算法,實時分析傳感器數據。通過學習大量礦山場景數據,識別不同危險情況并分級;還能計算本車與前后方目標的相對運動趨勢,預測碰撞風險,提前為駕駛員提供預警。?石油工程車防碰撞預警多少錢
- 黔南州礦卡前向防碰撞預警廠家 2025-12-16
- 齊齊哈爾路橋工程車防碰撞預警廠家 2025-12-16
- 煙臺礦車北斗5G定位怎么樣 2025-12-16
- 伊春消防車防碰撞預警 2025-12-15
- 邯鄲石油工程車360全景設計 2025-12-15
- 迪慶工程機械北斗5G定位終端 2025-12-15
- 那曲渣土車北斗5G定位廠家 2025-12-15
- 赤峰商用車盲區360全景服務商 2025-12-15
- 黔南州商用車北斗5G定位服務商 2025-12-15
- 哈密工程車前向防碰撞預警多少錢 2025-12-15
- 順義區車牌識別一體機銷售廠家 2025-12-16
- 廬陽區辦公用短信服務24小時服務 2025-12-16
- 長治活性炭FM73全面罩標準 2025-12-16
- 火情監測儀供應商 2025-12-16
- 北京滅火器產品介紹 2025-12-16
- 天津本地RFID嵌體市場報價 2025-12-16
- 哪里有滅火器裝置 2025-12-16
- 虹口區國內云客服服務熱線 2025-12-16
- 江蘇個人防爆管件推薦貨源 2025-12-16
- 杭州無線圖數一體機生產 2025-12-16