學(xué)習(xí)開源開放共享
格物斯坦機(jī)械手臂的**價(jià)值在于打通“學(xué)習(xí)-創(chuàng)造-應(yīng)用”閉環(huán):教學(xué)場(chǎng)景:在K12階段,學(xué)生通過搭建機(jī)械臂模型學(xué)習(xí)齒輪傳動(dòng)、杠桿原理等工程知識(shí);高中生則開發(fā)“智能分揀系統(tǒng)”,結(jié)合OpenCV識(shí)別不同顏色與形狀的物體。在高校科研中,上海大學(xué)與清華大學(xué)聯(lián)合實(shí)驗(yàn)室利用該平臺(tái)研究具身智能算法,例如優(yōu)化雙足機(jī)器人Tinker的關(guān)節(jié)控制策略。競(jìng)賽與社會(huì)議題:機(jī)械手臂成為解決真實(shí)問題的工具。如山區(qū)學(xué)生設(shè)計(jì)“智能澆花系統(tǒng)”,通過土壤濕度傳感器觸發(fā)機(jī)械臂灌溉指令;IRM大賽獲獎(jiǎng)項(xiàng)目“林火監(jiān)測(cè)無人機(jī)”則整合紅外傳感器與機(jī)械臂,實(shí)現(xiàn)火源定位誤差小于2米。產(chǎn)業(yè)賦能:平臺(tái)的開源特性降低企業(yè)研發(fā)成本。傳統(tǒng)需500萬元投入的機(jī)械臂原型開發(fā),現(xiàn)可單人5天內(nèi)完成;優(yōu)必選、宇樹科技等企業(yè)基于其硬件架構(gòu)開發(fā)出教育與工業(yè)場(chǎng)景產(chǎn)品,例如9.9萬元級(jí)家用服務(wù)機(jī)器人已投入養(yǎng)老醫(yī)療領(lǐng)域。OpenLoong社區(qū)共享3D模型與代碼庫,避免“重復(fù)造輪子”。學(xué)習(xí)開源開放共享
硬件層面,格物斯坦的金屬開源機(jī)器人系列是其標(biāo)志性產(chǎn)品。采用鋁合金材料打造的全金屬構(gòu)件支持快速拆裝,具備工業(yè)級(jí)精度與耐用性,例如“鐵達(dá)摩金屬開源機(jī)器人”兼容樂高式積木體系,同時(shí)支持舵機(jī)、傳感器等模塊的自由擴(kuò)展,允許學(xué)生從簡(jiǎn)單的機(jī)械組裝進(jìn)階至復(fù)雜的仿生機(jī)器人開發(fā)。其開源仿生平臺(tái)(如仿生蛇、仿生犬)則進(jìn)一步融入生物力學(xué)與空間自由度設(shè)計(jì),結(jié)合3D打印部件,學(xué)生可通過調(diào)整關(guān)節(jié)參數(shù)模擬生物運(yùn)動(dòng)步態(tài),在硬件層面實(shí)踐跨學(xué)科知識(shí)整合。學(xué)習(xí)開源開放共享山區(qū)學(xué)生用開源土壤濕度傳感器開發(fā)智能灌溉機(jī)器人。
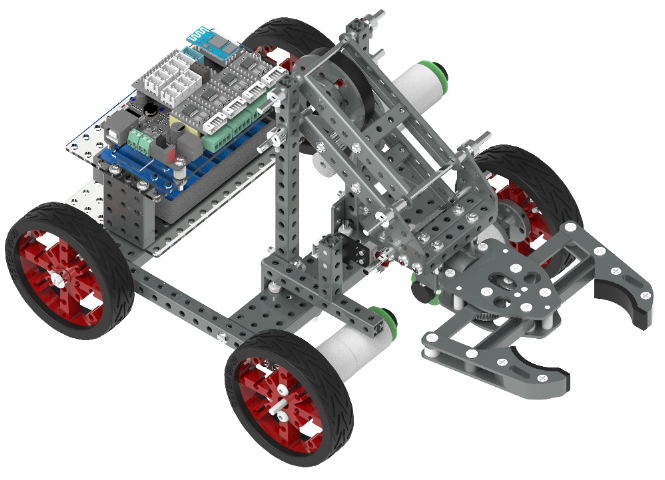
格物斯坦機(jī)械手臂采用**度鋁合金結(jié)構(gòu)件,通過超精密加工技術(shù)實(shí)現(xiàn)0.01毫米公差精度,確保機(jī)械臂在高速運(yùn)動(dòng)中的穩(wěn)定性和耐久性。其關(guān)節(jié)模塊搭載高扭矩舵機(jī)(扭矩范圍0.15-20kg·cm),支持多自由度運(yùn)動(dòng)(如六軸協(xié)同),并預(yù)留標(biāo)準(zhǔn)化接口(I2C、UART、GPIO),兼容超聲測(cè)距、紅外巡線、溫濕度傳感器等300余種電子模塊,以及第三方執(zhí)行器如氣動(dòng)機(jī)械爪。**控制器GC-500/GC-600系列集成藍(lán)牙4.0模塊,支持手機(jī)App遙控(如“你畫我跑”軌跡生成、語音指令交互),同時(shí)深度兼容ROS(Robot Operating System)開發(fā)套件。這一設(shè)計(jì)使學(xué)生可直接調(diào)用ROS中的運(yùn)動(dòng)控制API、傳感器驅(qū)動(dòng)庫及OpenCV視覺算法,用Python/C++編寫自主導(dǎo)航程序,實(shí)現(xiàn)從仿真到實(shí)體硬件的無縫遷移。
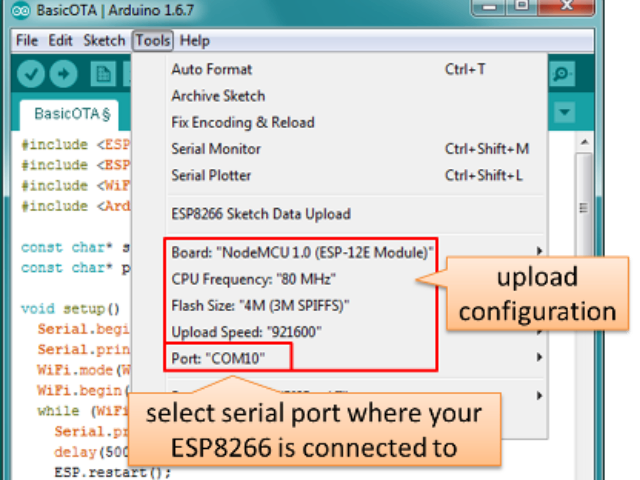
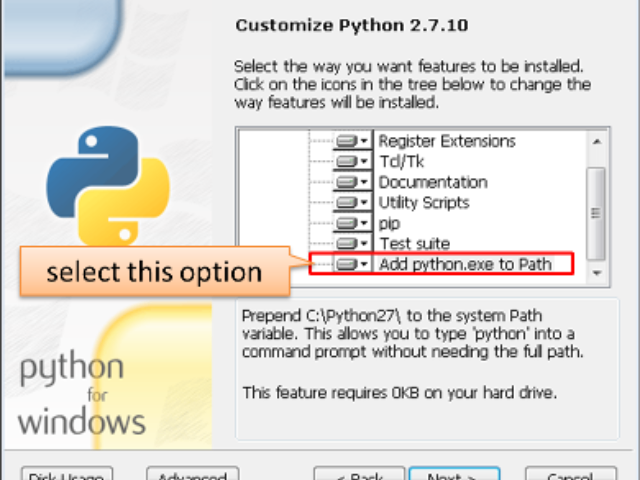
開源課程以C/C++語言為重點(diǎn),學(xué)生從流程圖設(shè)計(jì)入手,逐步進(jìn)階至工業(yè)級(jí)代碼開發(fā)。課程通過GLP圖形化軟件實(shí)現(xiàn)編程邏輯的可視化過渡——例如拖拽“舵機(jī)角度”“環(huán)境光強(qiáng)度”等積木塊生成控制指令,并一鍵轉(zhuǎn)譯為Arduino代碼,降低高階語言的學(xué)習(xí)門檻。在高級(jí)階段,學(xué)生需編寫算法控制多自由度系統(tǒng),如為“螳螂機(jī)器人”設(shè)計(jì)捕食邏輯:通過陀螺儀數(shù)據(jù)檢測(cè)身體傾斜度,結(jié)合超聲測(cè)距觸發(fā)機(jī)械臂抓取動(dòng)作,實(shí)現(xiàn)仿生行為的動(dòng)態(tài)響應(yīng)。課程導(dǎo)向復(fù)雜系統(tǒng)的原型開發(fā),如“顏色分類系統(tǒng)”需融合OpenCV視覺識(shí)別與機(jī)械臂控制,通過YOLO模型區(qū)分物體顏色并指揮分揀機(jī)構(gòu)完成毫米級(jí)操作;“柔性制造流水線”則需協(xié)調(diào)傳送帶電機(jī)、機(jī)械爪與紅外計(jì)數(shù)模塊,模擬工業(yè)自動(dòng)化流程。這些項(xiàng)目不僅要求學(xué)生貫通機(jī)械動(dòng)力學(xué)與傳感技術(shù),更需運(yùn)用工程迭代思維——在“格物”仿真平臺(tái)預(yù)演抗強(qiáng)風(fēng)、高負(fù)載場(chǎng)景,再通過示波器監(jiān)測(cè)實(shí)體硬件運(yùn)行參數(shù),優(yōu)化代碼與結(jié)構(gòu)設(shè)計(jì),壓縮研發(fā)周期。示波器監(jiān)測(cè)接口開源化,實(shí)時(shí)調(diào)試硬件運(yùn)行參數(shù)。
格物斯坦開源產(chǎn)品的深層意義,在于它將工業(yè)標(biāo)準(zhǔn)與教育目標(biāo)深度融合。例如,在“家庭衛(wèi)士”智能家居項(xiàng)目中,學(xué)生需配置紅外傳感器實(shí)現(xiàn)自動(dòng)門開閉,調(diào)試電機(jī)扭矩確保門體平穩(wěn)運(yùn)行,并通過算法優(yōu)化能耗——這一過程同時(shí)融貫了機(jī)械工程、電子工程與軟件工程的跨學(xué)科思維。而產(chǎn)品對(duì)ROS(Robot Operating System)等工業(yè)框架的兼容性,則讓學(xué)生提前接觸無人駕駛、多機(jī)協(xié)作等前沿場(chǎng)景,例如通過Gazebo模擬器測(cè)試機(jī)器人集群避障算法,再部署至實(shí)體機(jī)器人驗(yàn)證。這種“虛實(shí)結(jié)合、學(xué)創(chuàng)一體” 的模式,不僅培養(yǎng)了技術(shù)能力,更塑造了“以開放工具解決復(fù)雜問題”的創(chuàng)造者心智。仿真平臺(tái)預(yù)演機(jī)械臂抗強(qiáng)風(fēng)策略,再部署實(shí)體硬件驗(yàn)證,壓縮研發(fā)周期。學(xué)習(xí)開源開放共享
微型機(jī)床課程開源“數(shù)字匠人”設(shè)計(jì)圖,培養(yǎng)智能制造技能。學(xué)習(xí)開源開放共享
關(guān)于金屬開源系列課程——低齡段(10-13歲) 以 Gbot機(jī)器人課程 為起點(diǎn),學(xué)生通過36課時(shí)的項(xiàng)目實(shí)踐,從Scratch圖形化編程切入硬件交互。例如,在“螳螂機(jī)器人”項(xiàng)目中,學(xué)生需設(shè)計(jì)多關(guān)節(jié)機(jī)械結(jié)構(gòu),結(jié)合巡線傳感器與超聲模塊實(shí)現(xiàn)動(dòng)態(tài)避障;而“智能伸縮門”項(xiàng)目則要求學(xué)生運(yùn)用限位開關(guān)與藍(lán)牙模塊,調(diào)試電機(jī)扭矩與齒輪傳動(dòng)系統(tǒng),理解物理信號(hào)到數(shù)字指令的轉(zhuǎn)換邏輯。課程同步引入 GScratch軟件,支持圖形化指令一鍵轉(zhuǎn)譯為Arduino C代碼,為高階開發(fā)架設(shè)橋梁。學(xué)習(xí)開源開放共享
- 人工智能產(chǎn)品介紹 2025-12-16
- 編程語音識(shí)別 2025-12-16
- 中齡段積木系列套裝 2025-12-16
- 創(chuàng)意拼搭積木啟蒙編程 2025-12-16
- 格物斯坦編程比較好 2025-12-16
- 未來創(chuàng)客實(shí)驗(yàn)室編程學(xué)習(xí) 2025-12-15
- 比較好的創(chuàng)客實(shí)驗(yàn)室總結(jié) 2025-12-15
- Python編程算法實(shí)踐 2025-12-15
- 創(chuàng)客機(jī)器人設(shè)施 2025-12-15
- 點(diǎn)讀筆積木搭建蹺蹺板 2025-12-15
- 澗西區(qū)高升學(xué)率初中政策傾斜 2025-12-16
- 瀘州研究生備考資料考研學(xué)費(fèi) 2025-12-16
- 成人高考是第幾學(xué)歷 2025-12-16
- 楊浦區(qū)幼升小 2025-12-16
- 蕪湖企業(yè)家交流座談會(huì)解決方案 2025-12-16
- 陽江車銑復(fù)合機(jī)構(gòu) 2025-12-16
- 涇源大學(xué)六級(jí)英語提分技巧 2025-12-16
- 洛陽市澗西區(qū)東明編導(dǎo)藝考集訓(xùn)學(xué)校 2025-12-16
- 廬陽區(qū)智能數(shù)字課程制作服務(wù)保證 2025-12-16
- 英語在線費(fèi)用 2025-12-16