-
 太原機(jī)場(chǎng)工程車(chē)360全景專(zhuān)賣(mài)
太原機(jī)場(chǎng)工程車(chē)360全景專(zhuān)賣(mài)在挖掘機(jī)復(fù)雜多變的作業(yè)場(chǎng)景中,龐大的動(dòng)臂、旋轉(zhuǎn)的上車(chē)體、以及狹窄的作業(yè)空間共同構(gòu)筑了難以逾越的視野盲區(qū)“雷區(qū)”。佳興偉誠(chéng)挖掘機(jī)360全景盲區(qū)監(jiān)測(cè)駕駛輔助系統(tǒng),正是為解決這一行業(yè)痛點(diǎn)而生。系統(tǒng)采用高防護(hù)魚(yú)眼攝像頭,精密部署于動(dòng)臂根部、駕駛室頂部、配重尾部及底盤(pán)兩側(cè)。佳興偉誠(chéng)獨(dú)有的高速圖像處理芯片,瞬間完成畸變校正與六路視頻無(wú)縫拼接,生成實(shí)時(shí)俯視全景圖,將曾經(jīng)“看不見(jiàn)”的區(qū)域徹底暴露于操作手眼前。在管溝挖掘中,系統(tǒng)動(dòng)態(tài)顯示鏟斗與溝壁的精確距離及預(yù)估落點(diǎn);在建筑物拆除時(shí),全景視圖清晰呈現(xiàn)回轉(zhuǎn)半徑內(nèi)鋼筋、管線的位置,避免勾掛;在物料裝卸時(shí),后方自卸車(chē)的相對(duì)位置與高度一目了然。尤為關(guān)鍵的是,系統(tǒng)關(guān)鍵在于...
2025-09-20 -
 路橋工程車(chē)360全景定制設(shè)計(jì)
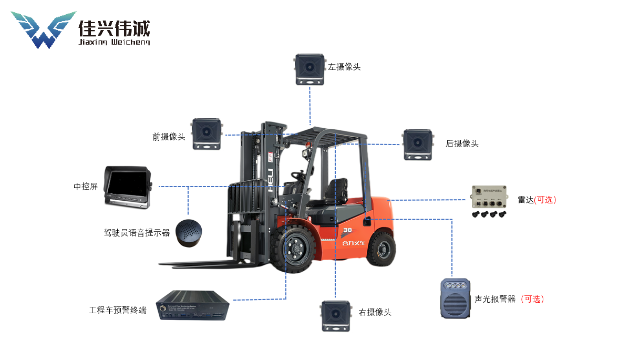
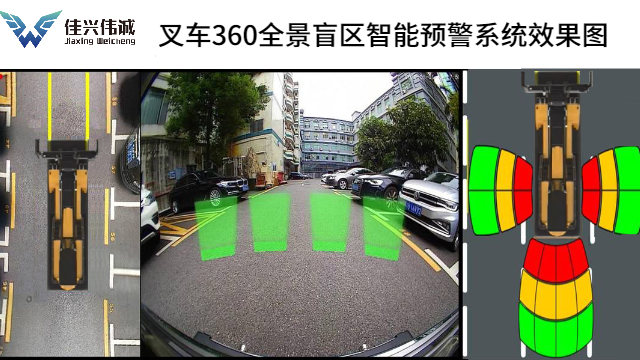
路橋工程車(chē)360全景定制設(shè)計(jì)叉車(chē)作業(yè)環(huán)境多為倉(cāng)儲(chǔ)庫(kù)房、工廠車(chē)間等場(chǎng)景,貨物堆放密集、人車(chē)混流頻繁,盲區(qū)極易引發(fā)碰撞事故,360 度全景盲區(qū)無(wú)死角可視化預(yù)警輔助系統(tǒng)成為保障作業(yè)安全的關(guān)鍵裝備。該系統(tǒng)在叉車(chē)車(chē)身四周安裝 4 - 6 個(gè)高清超廣角攝像頭,實(shí)時(shí)捕捉貨叉、車(chē)身兩側(cè)及后方的環(huán)境影像,通過(guò) AI 圖像拼接技術(shù),將多路畫(huà)面合成為無(wú)縫的 360 度全景鳥(niǎo)瞰圖,清晰呈現(xiàn)在駕駛室內(nèi)的顯示屏上,讓駕駛員無(wú)需頻繁轉(zhuǎn)頭,即可掌握車(chē)身周?chē)柏洸孀鳂I(yè)區(qū)域的細(xì)節(jié)。系統(tǒng)搭載智能識(shí)別算法,能區(qū)分行人、貨架、其他設(shè)備等物體,當(dāng)檢測(cè)到人員進(jìn)入貨叉周邊 7米的危險(xiǎn)范圍,或叉車(chē)轉(zhuǎn)向、倒車(chē)時(shí)遇障礙物,會(huì)立即觸發(fā)多級(jí)預(yù)警:駕駛室內(nèi)發(fā)出語(yǔ)音提示與燈光閃爍,...
2025-09-19 -
 鄂爾多斯裝載車(chē)盲區(qū)360全景方案
鄂爾多斯裝載車(chē)盲區(qū)360全景方案工程車(chē) 360 全景環(huán)視盲區(qū)駕駛輔助系統(tǒng),是現(xiàn)代交通環(huán)境下保障工程車(chē)行車(chē)安全的重要科技裝備。其針對(duì)工程車(chē)體積大、駕駛位高、操作復(fù)雜及盲區(qū)多的特點(diǎn),通過(guò)高科技手段明顯提升了行車(chē)安全性。?該系統(tǒng)的在于借助車(chē)身前后左右的四枚超廣角攝像頭,實(shí)時(shí)采集周?chē)曨l數(shù)據(jù),經(jīng)主機(jī)處理和視頻拼接技術(shù),在駕駛室內(nèi)呈現(xiàn) 360 度無(wú)死角全景鳥(niǎo)瞰圖,讓駕駛員輕松掌握車(chē)輛周邊情況,消除盲區(qū)障礙。?除基礎(chǔ)環(huán)視功能外,系統(tǒng)集成了多重主動(dòng)安全功能。BSD 行人檢測(cè)智能預(yù)警功能,能識(shí)別靠近人員,通過(guò)車(chē)內(nèi)語(yǔ)音報(bào)警和車(chē)外大功率聲光報(bào)警的雙重機(jī)制,既提醒駕駛員,又警示過(guò)往人員遠(yuǎn)離,兼顧多方安全。?同時(shí),系統(tǒng)支持多路行車(chē)記錄,可記錄作業(yè)過(guò)...
2025-09-19 -
 臨汾石油工程車(chē)360全景專(zhuān)賣(mài)
臨汾石油工程車(chē)360全景專(zhuān)賣(mài)地下礦用鏟運(yùn)機(jī)在狹窄巷道作業(yè)時(shí),巷道寬度能容納車(chē)身,兩側(cè)巖壁與鏟運(yùn)機(jī)的間隙形成致命盲區(qū),易碰撞巷道支護(hù)或行走的礦工。佳興偉誠(chéng)為其設(shè)計(jì)的系統(tǒng),將 360 全景攝像頭與超聲波雷達(dá)集成在鏟運(yùn)機(jī)車(chē)身四周。鏟運(yùn)機(jī)轉(zhuǎn)彎時(shí),雷達(dá)掃描 5 米內(nèi)的巷道壁和人員,攝像頭實(shí)時(shí)拼接巷道全景,若與巖壁距離小于 0.5 米,系統(tǒng)發(fā)出急促警報(bào),同時(shí)在畫(huà)面中用紅色線條標(biāo)注危險(xiǎn)邊界;當(dāng)?shù)V工在盲區(qū)行走,雷達(dá)通過(guò)人體反射波鎖定,攝像頭的紅外功能在無(wú)照明巷道內(nèi)清晰顯示人員輪廓,雙重提示駕駛員減速,避免巷道內(nèi)的碰撞事故。選擇佳興偉誠(chéng)工程車(chē) 360 全景駕駛輔助系統(tǒng),就是選擇對(duì)工程安全的高度負(fù)責(zé)。臨汾石油工程車(chē)360全景專(zhuān)賣(mài)實(shí)踐是檢驗(yàn)工...
2025-09-19 -
晉中商用車(chē)盲區(qū)360全景方案
叉車(chē)作業(yè)環(huán)境多為倉(cāng)儲(chǔ)庫(kù)房、工廠車(chē)間等場(chǎng)景,貨物堆放密集、人車(chē)混流頻繁,盲區(qū)極易引發(fā)碰撞事故,360 度全景盲區(qū)無(wú)死角可視化預(yù)警輔助系統(tǒng)成為保障作業(yè)安全的關(guān)鍵裝備。該系統(tǒng)在叉車(chē)車(chē)身四周安裝 4 - 6 個(gè)高清超廣角攝像頭,實(shí)時(shí)捕捉貨叉、車(chē)身兩側(cè)及后方的環(huán)境影像,通過(guò) AI 圖像拼接技術(shù),將多路畫(huà)面合成為無(wú)縫的 360 度全景鳥(niǎo)瞰圖,清晰呈現(xiàn)在駕駛室內(nèi)的顯示屏上,讓駕駛員無(wú)需頻繁轉(zhuǎn)頭,即可掌握車(chē)身周?chē)柏洸孀鳂I(yè)區(qū)域的細(xì)節(jié)。系統(tǒng)搭載智能識(shí)別算法,能區(qū)分行人、貨架、其他設(shè)備等物體,當(dāng)檢測(cè)到人員進(jìn)入貨叉周邊 7米的危險(xiǎn)范圍,或叉車(chē)轉(zhuǎn)向、倒車(chē)時(shí)遇障礙物,會(huì)立即觸發(fā)多級(jí)預(yù)警:駕駛室內(nèi)發(fā)出語(yǔ)音提示與燈光閃爍,...
2025-09-18 -
 石家莊工程車(chē)盲區(qū)360全景專(zhuān)賣(mài)
石家莊工程車(chē)盲區(qū)360全景專(zhuān)賣(mài)環(huán)衛(wèi)清潔車(chē)在城市環(huán)境維護(hù)中扮演著至關(guān)重要的角色,它們不辭辛勞地清掃街道、收集垃圾,為城市的整潔美麗付出努力。然而,由于環(huán)衛(wèi)清潔車(chē)車(chē)身較大,存在眾多盲區(qū),在作業(yè)和行駛過(guò)程中極易引發(fā)安全事故,對(duì)環(huán)衛(wèi)工人、其他道路使用者的生命安全構(gòu)成威脅。為了有效解決這一問(wèn)題,360 全景盲區(qū)預(yù)警系統(tǒng)應(yīng)運(yùn)而生,成為提升環(huán)衛(wèi)清潔車(chē)安全性的關(guān)鍵技術(shù)。 360 全景盲區(qū)預(yù)警系統(tǒng)主要基于多個(gè)攝像頭和先進(jìn)的圖像算法。在環(huán)衛(wèi)清潔車(chē)的車(chē)身四周,包括車(chē)頭、車(chē)尾、兩側(cè)后視鏡下方等位置,安裝多個(gè)高清攝像頭。這些攝像頭實(shí)時(shí)采集車(chē)輛周?chē)膱D像信息,并將其傳輸至中心處理器。中心處理器通過(guò)圖像拼接算法,將各個(gè)攝像頭的畫(huà)面整合為一個(gè)完整的 36...
2025-09-18 -
 包頭大型車(chē)輛盲區(qū)360全景哪家好
包頭大型車(chē)輛盲區(qū)360全景哪家好工程機(jī)械是國(guó)民經(jīng)濟(jì)發(fā)展的重要生產(chǎn)工具,在基礎(chǔ)設(shè)施建設(shè)中工程機(jī)械發(fā)揮著重 要作用,而在工程機(jī)械領(lǐng)域,挖掘機(jī)是其中重要的細(xì)分產(chǎn)品之一,挖掘機(jī)是一種 用于公路、鐵路、建筑、水電、港口、礦山等建設(shè)工程的土石方施工機(jī)械。 然而工程機(jī)械往往是體型過(guò)大,容易被遮擋視線。在作業(yè)環(huán)境中,很多地方是光線差、 噪聲大的惡劣環(huán)境作業(yè),而車(chē)輛上配置的后視鏡卻很難起到應(yīng)有的作用。而在建設(shè)工地、 石場(chǎng),道路建設(shè)場(chǎng)所多為露天作業(yè),往往是粉塵多、噪音大,工況環(huán)境復(fù)雜,作業(yè)工人多, 其他作業(yè)車(chē)也多,往往是人車(chē)交互密集,很容易發(fā)生碾壓等安全生產(chǎn)事故。 為貫徹落實(shí)安全作業(yè)管理目標(biāo),打造作業(yè)現(xiàn)場(chǎng)車(chē)輛全天候、安全監(jiān)管模式,佳興偉 誠(chéng)將A...
2025-09-18 -
陽(yáng)泉機(jī)場(chǎng)工程車(chē)360全景
在塵土飛揚(yáng)、坡陡彎急、車(chē)輛設(shè)備密集的露天礦山,佳興偉誠(chéng)360全景駕駛輔助系統(tǒng)成為重型礦用自卸車(chē)的“安全之眼”。針對(duì)礦卡龐大的車(chē)身尺寸和極高的盲區(qū)風(fēng)險(xiǎn),系統(tǒng)配置超高防護(hù)等級(jí)攝像頭,分布于車(chē)頭、車(chē)頂、兩側(cè)后視鏡下方及車(chē)尾關(guān)鍵點(diǎn),無(wú)懼礦場(chǎng)惡劣的粉塵、震動(dòng)、高低溫及飛石沖擊。佳興偉誠(chéng)專(zhuān)有算法實(shí)時(shí)合成360度無(wú)死角環(huán)視影像,并將車(chē)輛龐大的輪廓線疊加于鳥(niǎo)瞰圖上,駕駛員在駕駛室即可清晰掌握車(chē)身周?chē)鷶?shù)米范圍內(nèi)所有地形起伏、鄰近設(shè)備、邊坡距離及人員活動(dòng)情況。在狹窄的排土場(chǎng)邊緣倒車(chē)卸載、蜿蜒的礦山道路會(huì)車(chē)、夜間低能見(jiàn)度條件下行駛時(shí),系統(tǒng)提供的全景視野與動(dòng)態(tài)距離警示(可選配雷達(dá)融合)是避免碾壓、碰撞、傾翻事故的生命...
2025-09-17 -
 呼倫貝爾消防車(chē)360全景找哪家
呼倫貝爾消防車(chē)360全景找哪家工程車(chē) 360 全景盲區(qū)監(jiān)測(cè)預(yù)警系統(tǒng)并非簡(jiǎn)單的攝像頭拼接,其背后蘊(yùn)含著復(fù)雜的技術(shù)邏輯。系統(tǒng)通常由多個(gè)高清廣角攝像頭、圖像處理器、顯示屏以及預(yù)警模塊組成。攝像頭一般安裝在車(chē)頭、車(chē)尾、左右后視鏡等關(guān)鍵位置,確保無(wú)死角覆蓋車(chē)輛周?chē)h(huán)境。這些攝像頭需要具備高分辨率、高動(dòng)態(tài)范圍的特性,以適應(yīng)強(qiáng)光、逆光、夜間等不同光照條件,保證在各種天氣和時(shí)段都能捕捉到清晰的畫(huà)面。圖像處理器則是系統(tǒng)的 “大腦”,它能快速對(duì)多個(gè)攝像頭采集的畫(huà)面進(jìn)行畸變校正、拼接融合,消除畫(huà)面之間的重疊和錯(cuò)位,形成一幅無(wú)縫銜接的全景圖像。同時(shí),處理器還會(huì)對(duì)圖像中的移動(dòng)物體、障礙物進(jìn)行智能識(shí)別,一旦發(fā)現(xiàn)有物體進(jìn)入預(yù)設(shè)的危險(xiǎn)區(qū)域,就會(huì)通過(guò)聲音報(bào)...
2025-09-17 -
 呼倫貝爾裝載車(chē)盲區(qū)360全景設(shè)計(jì)
呼倫貝爾裝載車(chē)盲區(qū)360全景設(shè)計(jì)地下礦用鏟運(yùn)機(jī)在狹窄巷道作業(yè)時(shí),巷道寬度能容納車(chē)身,兩側(cè)巖壁與鏟運(yùn)機(jī)的間隙形成致命盲區(qū),易碰撞巷道支護(hù)或行走的礦工。佳興偉誠(chéng)為其設(shè)計(jì)的系統(tǒng),將 360 全景攝像頭與超聲波雷達(dá)集成在鏟運(yùn)機(jī)車(chē)身四周。鏟運(yùn)機(jī)轉(zhuǎn)彎時(shí),雷達(dá)掃描 5 米內(nèi)的巷道壁和人員,攝像頭實(shí)時(shí)拼接巷道全景,若與巖壁距離小于 0.5 米,系統(tǒng)發(fā)出急促警報(bào),同時(shí)在畫(huà)面中用紅色線條標(biāo)注危險(xiǎn)邊界;當(dāng)?shù)V工在盲區(qū)行走,雷達(dá)通過(guò)人體反射波鎖定,攝像頭的紅外功能在無(wú)照明巷道內(nèi)清晰顯示人員輪廓,雙重提示駕駛員減速,避免巷道內(nèi)的碰撞事故。支持 5G 網(wǎng)絡(luò)傳輸,佳興偉誠(chéng)工程車(chē) 360 全景畫(huà)面可實(shí)時(shí)同步至遠(yuǎn)程控制中心,實(shí)現(xiàn)遠(yuǎn)程協(xié)同作業(yè)指導(dǎo)。呼倫貝爾裝載車(chē)...
2025-09-17 -
陽(yáng)泉礦車(chē)盲區(qū)360全景定制
在城市道路行駛時(shí),車(chē)輛側(cè)方與后方盲區(qū)是事故高發(fā)區(qū),佳興偉誠(chéng)的 AI 識(shí)別預(yù)警系統(tǒng)針對(duì)性解決這一痛點(diǎn)。當(dāng)車(chē)輛準(zhǔn)備變道,AI 系統(tǒng)會(huì)持續(xù)掃描兩側(cè)盲區(qū),若此時(shí)有車(chē)輛快速接近,系統(tǒng)立即在對(duì)應(yīng)后視鏡區(qū)域亮起警示燈,同時(shí)車(chē)內(nèi)揚(yáng)聲器發(fā)出 “禁止變道” 的語(yǔ)音警告。對(duì)于突然闖入盲區(qū)的行人,系統(tǒng)反應(yīng)更迅速,0.3 秒內(nèi)即可完成識(shí)別與預(yù)警,顯示屏上會(huì)用紅色方框鎖定目標(biāo)并閃爍,讓駕駛員瞬間察覺(jué)危險(xiǎn)。在早晚高峰的擁堵路段,系統(tǒng)還能區(qū)分靜態(tài)障礙物與動(dòng)態(tài)目標(biāo),避免對(duì)路邊欄桿等物體誤報(bào),誤報(bào)率控制在 3% 以下。佳興偉誠(chéng)工程車(chē)360全景盲區(qū)監(jiān)測(cè)預(yù)警系統(tǒng)采用 “毫米波雷達(dá) + 視覺(jué)圖像” 融合技術(shù),提升識(shí)別準(zhǔn)確率。陽(yáng)泉礦車(chē)盲...
2025-09-16 -
保定礦車(chē)盲區(qū)360全景服務(wù)商
工程車(chē)360全景盲區(qū)監(jiān)測(cè)預(yù)警系統(tǒng)的效能,源于其精密而強(qiáng)大的技術(shù)架構(gòu)。其硬件基石是分布在車(chē)身關(guān)鍵位置(通常為車(chē)頭、車(chē)尾、左右后視鏡下方或車(chē)身兩側(cè))的4至6顆高性能超廣角魚(yú)眼攝像頭,這些攝像頭經(jīng)過(guò)特殊的光學(xué)設(shè)計(jì)和防護(hù)處理,具備防水防塵、抗震抗沖擊、寬溫域工作,確保在惡劣工況下持續(xù)提供穩(wěn)定清晰的原始圖像。處理單元搭載高性能圖像處理芯片和算法引擎,實(shí)時(shí)接收所有攝像頭的視頻流,執(zhí)行包括畸變矯正、視角變換、多路視頻同步、圖像拼接融合等復(fù)雜運(yùn)算,在駕駛室內(nèi)的高亮度、防眩光顯示屏上輸出無(wú)畸變、低延遲(通常≤50ms)的360度全景鳥(niǎo)瞰視圖。盲區(qū)監(jiān)測(cè)預(yù)警功能則依賴(lài)于集成在車(chē)身周?chē)暮撩撞ɡ走_(dá)(中短距)和/或超聲...
2025-09-16 -
 陽(yáng)泉機(jī)場(chǎng)工程車(chē)360全景電話(huà)
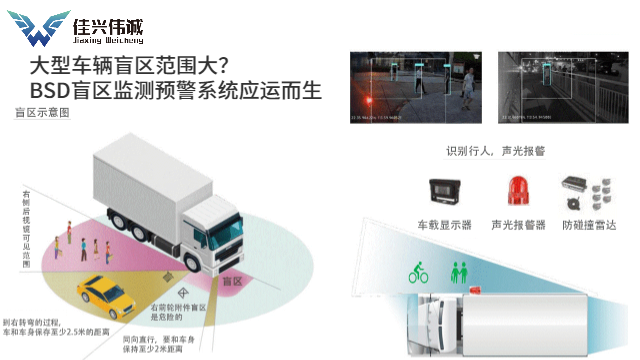
陽(yáng)泉機(jī)場(chǎng)工程車(chē)360全景電話(huà)對(duì)于大型車(chē)輛而言,佳興偉誠(chéng)的大型車(chē)輛 360 全景系統(tǒng)更是不可或缺,尤其針對(duì)貨車(chē)、客車(chē)、工程車(chē)等車(chē)身龐大的車(chē)型,開(kāi)發(fā)了對(duì)其車(chē)輛的適配版本。大型車(chē)輛因車(chē)身長(zhǎng)度超過(guò) 6 米,傳統(tǒng)后視鏡存在的視覺(jué)盲區(qū)范圍可達(dá) 20-30 平方米,駕駛員在駕駛過(guò)程中難以掌握車(chē)輛周?chē)闆r。佳興偉誠(chéng)為大型車(chē)輛定制的 360 全景系統(tǒng),采用了更大廣角的攝像頭(可視角度達(dá) 190 度),并增加了攝像頭數(shù)量,部分車(chē)型甚至配備 6-8 個(gè)攝像頭,確保覆蓋車(chē)輛全長(zhǎng)及兩側(cè) 3 米范圍。系統(tǒng)在處理算法上進(jìn)行了優(yōu)化,針對(duì)大型車(chē)輛的轉(zhuǎn)彎半徑、內(nèi)輪差等特點(diǎn),開(kāi)發(fā)了軌跡預(yù)測(cè)模型,在轉(zhuǎn)彎時(shí)能動(dòng)態(tài)顯示車(chē)輛內(nèi)輪差區(qū)域,并發(fā)出聲光預(yù)警。無(wú)論是轉(zhuǎn)彎、倒...
2025-09-15 -
 大同工程車(chē)盲區(qū)360全景服務(wù)商
大同工程車(chē)盲區(qū)360全景服務(wù)商混凝土泵車(chē)作業(yè)時(shí),巨大的臂架展開(kāi)猶如擎天之柱,其下方及周邊區(qū)域存在嚴(yán)重的視覺(jué)盲區(qū),對(duì)現(xiàn)場(chǎng)人員安全構(gòu)成巨大威脅。佳興偉誠(chéng)工程車(chē)輛360全景駕駛輔助系統(tǒng),專(zhuān)為解決泵車(chē)這一痛點(diǎn)而生。系統(tǒng)攝像頭不覆蓋車(chē)體底盤(pán)四周(重點(diǎn)監(jiān)控支腿區(qū)域、車(chē)頭車(chē)尾),更創(chuàng)新性在關(guān)鍵臂架節(jié)點(diǎn)(如轉(zhuǎn)塔、1號(hào)臂根部)部署,通過(guò)佳興偉誠(chéng)特有的多視角融合技術(shù),將車(chē)身周?chē)孛鏍顩r與臂架下方實(shí)時(shí)畫(huà)面整合呈現(xiàn)于駕駛室屏幕。操作手在操作遙控器或駕駛室內(nèi),即可清晰掌握支腿下方是否堅(jiān)實(shí)平整、有無(wú)人員設(shè)備滯留、鋼筋網(wǎng)是否妨礙布管、臂架與臨近建筑物或高壓線的安全距離。系統(tǒng)可設(shè)置動(dòng)態(tài)安全警戒區(qū)域,當(dāng)人員或設(shè)備進(jìn)入臂架下方高危區(qū)域時(shí)自動(dòng)觸發(fā)聲光報(bào)警,為“...
2025-09-15 -
唐山大型車(chē)輛盲區(qū)360全景多少錢(qián)
在商用車(chē)的日常運(yùn)營(yíng)中,盲區(qū)問(wèn)題一直是威脅行車(chē)安全的重大隱患。佳興偉誠(chéng)商用車(chē)盲區(qū) 360 全景無(wú)死角監(jiān)測(cè)系統(tǒng)應(yīng)運(yùn)而生,為這一難題提供了完美解決方案。?該系統(tǒng)主要由多個(gè)高清攝像頭、毫米波雷達(dá)、超聲波雷達(dá)、車(chē)載處理單元和顯示屏組成。在商用車(chē)的車(chē)頭、車(chē)尾、車(chē)身兩側(cè)等關(guān)鍵位置,分別安裝 210° 超廣角高清攝像頭,可對(duì)車(chē)輛周邊環(huán)境進(jìn)行實(shí)時(shí)拍攝。同時(shí),毫米波雷達(dá)與超聲波雷達(dá)能夠在復(fù)雜天氣及光線條件下,感知車(chē)輛周?chē)矬w的距離與移動(dòng)情況。?系統(tǒng)的功能十分強(qiáng)大。通過(guò)圖像拼接技術(shù),能將多個(gè)攝像頭采集到的畫(huà)面無(wú)縫拼接,為駕駛員呈現(xiàn)出 360° 全景鳥(niǎo)瞰圖,讓車(chē)輛周?chē)鸂顩r一目了然,徹底消除傳統(tǒng)后視鏡的盲區(qū)。其搭載的 ...
2025-09-15 -
巴彥淖爾石油工程車(chē)360全景哪家好
工程車(chē)作業(yè)環(huán)境復(fù)雜,盲區(qū)問(wèn)題長(zhǎng)期制約施工安全。佳興偉誠(chéng)360全景盲區(qū)監(jiān)測(cè)預(yù)警系統(tǒng)通過(guò)4路210°超廣角高清攝像頭,實(shí)時(shí)采集車(chē)輛前后左右影像,依托AI圖像拼接技術(shù)生成360°無(wú)畸變?nèi)耙晥D,徹底消除傳統(tǒng)后視鏡盲區(qū)。以某地建設(shè)工地為例,系統(tǒng)在渣土車(chē)、攪拌車(chē)等設(shè)備上部署后,通過(guò)毫米波雷達(dá)與視覺(jué)融合技術(shù),實(shí)現(xiàn)5-7米范圍內(nèi)行人、車(chē)輛的智能識(shí)別,結(jié)合三級(jí)預(yù)警機(jī)制(車(chē)內(nèi)語(yǔ)音提示、蜂鳴器警報(bào)、車(chē)外聲光報(bào)警),使盲區(qū)事故率下降82%。該系統(tǒng)支持2D/3D視圖切換,提供前視行車(chē)、倒車(chē)后視、雙邊前視等六種模式,適配狹窄路段、裝卸貨區(qū)等高風(fēng)險(xiǎn)場(chǎng)景,成為行業(yè)安全標(biāo)準(zhǔn)升級(jí)的解決方案。360全景盲區(qū)監(jiān)測(cè)系統(tǒng)中駕駛員語(yǔ)音提...
2025-09-14 -
石家莊機(jī)場(chǎng)工程車(chē)360全景設(shè)計(jì)
露天礦大型自卸車(chē)在礦區(qū)主干道行駛時(shí),車(chē)長(zhǎng)超 10 米、車(chē)寬超 5 米,車(chē)身兩側(cè)及后方的盲區(qū)極易隱藏其他礦車(chē)或作業(yè)人員。佳興偉誠(chéng)的礦車(chē) 360 全景盲區(qū)監(jiān)測(cè)預(yù)警系統(tǒng),在車(chē)頭保險(xiǎn)杠、貨廂兩側(cè)及車(chē)尾安裝高清防爆攝像頭,配合間隔分布的超聲波雷達(dá)。當(dāng)有小型礦用皮卡從側(cè)方盲區(qū)駛來(lái),雷達(dá)先于攝像頭 0.3 秒探測(cè)到移動(dòng)目標(biāo),系統(tǒng)立即在全景畫(huà)面中用橙色框標(biāo)記,并發(fā)出一級(jí)預(yù)警聲;若作業(yè)人員靠近車(chē)身 3 米范圍,雷達(dá)穿透粉塵識(shí)別,攝像頭同步捕捉畫(huà)面,觸發(fā)二級(jí)警報(bào),駕駛室內(nèi)的警示燈對(duì)應(yīng)方向閃爍,讓駕駛員在礦區(qū)復(fù)雜路況下提前避讓?zhuān)蠓档团鲎诧L(fēng)險(xiǎn)。360全景盲區(qū)監(jiān)測(cè)系統(tǒng)中駕駛員語(yǔ)音提示器準(zhǔn)確播報(bào)闖入人員方位,讓駕駛員...
2025-09-14 -
忻州工程車(chē)盲區(qū)360全景服務(wù)商
叉車(chē)作業(yè)環(huán)境多為倉(cāng)儲(chǔ)庫(kù)房、工廠車(chē)間等場(chǎng)景,貨物堆放密集、人車(chē)混流頻繁,盲區(qū)極易引發(fā)碰撞事故,360 度全景盲區(qū)無(wú)死角可視化預(yù)警輔助系統(tǒng)成為保障作業(yè)安全的關(guān)鍵裝備。該系統(tǒng)在叉車(chē)車(chē)身四周安裝 4 - 6 個(gè)高清超廣角攝像頭,實(shí)時(shí)捕捉貨叉、車(chē)身兩側(cè)及后方的環(huán)境影像,通過(guò) AI 圖像拼接技術(shù),將多路畫(huà)面合成為無(wú)縫的 360 度全景鳥(niǎo)瞰圖,清晰呈現(xiàn)在駕駛室內(nèi)的顯示屏上,讓駕駛員無(wú)需頻繁轉(zhuǎn)頭,即可掌握車(chē)身周?chē)柏洸孀鳂I(yè)區(qū)域的細(xì)節(jié)。系統(tǒng)搭載智能識(shí)別算法,能區(qū)分行人、貨架、其他設(shè)備等物體,當(dāng)檢測(cè)到人員進(jìn)入貨叉周邊 7米的危險(xiǎn)范圍,或叉車(chē)轉(zhuǎn)向、倒車(chē)時(shí)遇障礙物,會(huì)立即觸發(fā)多級(jí)預(yù)警:駕駛室內(nèi)發(fā)出語(yǔ)音提示與燈光閃爍,...
2025-09-14 -
 巴彥淖爾裝載車(chē)盲區(qū)360全景定制
巴彥淖爾裝載車(chē)盲區(qū)360全景定制佳興偉誠(chéng)的車(chē)輛 360 全景盲區(qū) AI 識(shí)別預(yù)警系統(tǒng),是 360 全景技術(shù)與 AI 智能的完美融合。系統(tǒng)在傳統(tǒng) 360 全景基礎(chǔ)上,植入了先進(jìn)的深度學(xué)習(xí)算法,四個(gè)高清攝像頭采集的畫(huà)面不能拼接成全景視圖,更能通過(guò) AI 芯片實(shí)時(shí)分析畫(huà)面中的移動(dòng)物體。無(wú)論是行人、自行車(chē)還是其他車(chē)輛,AI 系統(tǒng)都能識(shí)別,識(shí)別率高達(dá) 98.5%。當(dāng)檢測(cè)到盲區(qū)中有物體靠近時(shí),系統(tǒng)會(huì)根據(jù)距離分級(jí)預(yù)警:3 米外發(fā)出黃色提示,1.5 米內(nèi)觸發(fā)紅色警報(bào),并伴隨方向盤(pán)震動(dòng)與語(yǔ)音提示 “右側(cè)盲區(qū)有車(chē)輛靠近”。這種主動(dòng)預(yù)警機(jī)制,比傳統(tǒng)全景系統(tǒng)更具前瞻性,為駕駛員爭(zhēng)取了 0.5-1 秒的反應(yīng)時(shí)間,經(jīng)測(cè)試可降低 80% 的盲區(qū)事故風(fēng)險(xiǎn)。...
2025-09-13 -
錫林郭勒汽車(chē)防撞360全景哪家好
佳興偉誠(chéng)360 全景盲區(qū)行人 AI 智能識(shí)別輔助系統(tǒng)的引入,為推土機(jī)、壓路機(jī)這兩種現(xiàn)代工程領(lǐng)域不可或缺的重型設(shè)備帶來(lái)了改變,極大地提升了其作業(yè)效率與安全性。該系統(tǒng)借助高精度攝像頭與先進(jìn)的人工智能算法,實(shí)現(xiàn)了對(duì)推土機(jī)、壓路機(jī)周?chē)?360 度無(wú)死角的實(shí)時(shí)監(jiān)控。當(dāng)有行人或其他障礙物進(jìn)入設(shè)備的盲區(qū)時(shí),系統(tǒng)會(huì)迅速啟動(dòng)預(yù)警機(jī)制,通過(guò)聲音、燈光等多種方式及時(shí)提醒駕駛員,有效避免了因視線受限而引發(fā)的安全事故,為設(shè)備作業(yè)筑起了一道堅(jiān)實(shí)的安全防線。除此之外,系統(tǒng)還具備強(qiáng)大的數(shù)據(jù)記錄與分析功能。它能夠?qū)崟r(shí)記錄設(shè)備的運(yùn)行狀態(tài)以及行人帶來(lái)的安全隱患等信息,這些信息為工程管理者提供了科學(xué)、的安全管理依據(jù),有助于管理者更好...
2025-09-13 -
北京石油工程車(chē)360全景專(zhuān)賣(mài)
工程車(chē)作業(yè)環(huán)境復(fù)雜,盲區(qū)問(wèn)題長(zhǎng)期制約施工安全。佳興偉誠(chéng)360全景盲區(qū)監(jiān)測(cè)預(yù)警系統(tǒng)通過(guò)4路210°超廣角高清攝像頭,實(shí)時(shí)采集車(chē)輛前后左右影像,依托AI圖像拼接技術(shù)生成360°無(wú)畸變?nèi)耙晥D,徹底消除傳統(tǒng)后視鏡盲區(qū)。以某地建設(shè)工地為例,系統(tǒng)在渣土車(chē)、攪拌車(chē)等設(shè)備上部署后,通過(guò)毫米波雷達(dá)與視覺(jué)融合技術(shù),實(shí)現(xiàn)5-7米范圍內(nèi)行人、車(chē)輛的智能識(shí)別,結(jié)合三級(jí)預(yù)警機(jī)制(車(chē)內(nèi)語(yǔ)音提示、蜂鳴器警報(bào)、車(chē)外聲光報(bào)警),使盲區(qū)事故率下降82%。該系統(tǒng)支持2D/3D視圖切換,提供前視行車(chē)、倒車(chē)后視、雙邊前視等六種模式,適配狹窄路段、裝卸貨區(qū)等高風(fēng)險(xiǎn)場(chǎng)景,成為行業(yè)安全標(biāo)準(zhǔn)升級(jí)的解決方案。工業(yè)級(jí)硬件和軟件打造,佳興偉誠(chéng)工程車(chē)...
2025-09-13 -
興安盟石油工程車(chē)360全景服務(wù)商
露天礦大型自卸車(chē)在礦區(qū)主干道行駛時(shí),車(chē)長(zhǎng)超 10 米、車(chē)寬超 5 米,車(chē)身兩側(cè)及后方的盲區(qū)極易隱藏其他礦車(chē)或作業(yè)人員。佳興偉誠(chéng)的礦車(chē) 360 全景盲區(qū)監(jiān)測(cè)預(yù)警系統(tǒng),在車(chē)頭保險(xiǎn)杠、貨廂兩側(cè)及車(chē)尾安裝高清防爆攝像頭,配合間隔分布的超聲波雷達(dá)。當(dāng)有小型礦用皮卡從側(cè)方盲區(qū)駛來(lái),雷達(dá)先于攝像頭 0.3 秒探測(cè)到移動(dòng)目標(biāo),系統(tǒng)立即在全景畫(huà)面中用橙色框標(biāo)記,并發(fā)出一級(jí)預(yù)警聲;若作業(yè)人員靠近車(chē)身 3 米范圍,雷達(dá)穿透粉塵識(shí)別,攝像頭同步捕捉畫(huà)面,觸發(fā)二級(jí)警報(bào),駕駛室內(nèi)的警示燈對(duì)應(yīng)方向閃爍,讓駕駛員在礦區(qū)復(fù)雜路況下提前避讓?zhuān)蠓档团鲎诧L(fēng)險(xiǎn)。工程車(chē)視野盲區(qū)是事故隱患,佳興偉誠(chéng) 360 全景駕駛輔助系統(tǒng)準(zhǔn)確消除,...
2025-09-12 -
呼倫貝爾機(jī)場(chǎng)工程車(chē)360全景找哪家
佳興偉誠(chéng)深耕車(chē)載安全領(lǐng)域多年,其工程車(chē)360全景盲區(qū)監(jiān)測(cè)預(yù)警系統(tǒng)以“無(wú)死角監(jiān)控+AI智能預(yù)警”為關(guān)鍵,通過(guò)車(chē)身四周部署的4路210°超廣角高清攝像頭,實(shí)時(shí)采集車(chē)輛周?chē)h(huán)境圖像。系統(tǒng)采用自主研發(fā)的圖像畸變矯正算法與深度學(xué)習(xí)技術(shù),將多路影像無(wú)縫拼接成360°全景鳥(niǎo)瞰圖,消除傳統(tǒng)后視鏡盲區(qū)。在復(fù)雜施工場(chǎng)景中,駕駛員可直觀觀察車(chē)身四周5米范圍內(nèi)的行人、車(chē)輛及障礙物,配合毫米波雷達(dá)的遠(yuǎn)距離探測(cè)能力,實(shí)現(xiàn)“視覺(jué)+雷達(dá)”雙模態(tài)感知。該系統(tǒng)已成功應(yīng)用于泥頭車(chē)、攪拌車(chē)、推土機(jī)等20余類(lèi)工程車(chē)輛,在前海建設(shè)工地實(shí)測(cè)中,盲區(qū)事故率下降82%,成為行業(yè)安全標(biāo)準(zhǔn)升級(jí)的標(biāo)準(zhǔn)案例。360 全景盲區(qū)駕駛輔助系統(tǒng)利用先進(jìn)的傳感...
2025-09-12 -
晉城石油工程車(chē)360全景專(zhuān)賣(mài)
部署工程車(chē)360全景盲區(qū)監(jiān)測(cè)預(yù)警系統(tǒng)是一項(xiàng)重要的安全投資,其產(chǎn)生的效益遠(yuǎn)超設(shè)備購(gòu)置成本。直接且無(wú)價(jià)的回報(bào)是明顯降低嚴(yán)重傷亡事故的發(fā)生率。系統(tǒng)通過(guò)消除盲區(qū)威脅和提供實(shí)時(shí)預(yù)警,有效防止了車(chē)輛碾壓行人、碰撞其他設(shè)備或撞毀設(shè)施等惡性事故,保障了現(xiàn)場(chǎng)人員的生命安全,避免了傷亡帶來(lái)的巨大悲痛、法律糾紛、停工調(diào)查及潛在的巨額賠償。事故率的下降直接減少了設(shè)備損壞和財(cái)產(chǎn)損失,節(jié)省了高額的維修費(fèi)用和因設(shè)備停用造成的產(chǎn)值損失(尤其是大型關(guān)鍵設(shè)備)。保險(xiǎn)公司對(duì)裝備先進(jìn)安全系統(tǒng)的車(chē)輛往往提供更優(yōu)惠的保費(fèi)費(fèi)率,長(zhǎng)期看降低了保險(xiǎn)成本。系統(tǒng)提升了操作員的安全感和信心,減少了因擔(dān)心盲區(qū)事故而產(chǎn)生的心理壓力,有助于提高工作效率和...
2025-09-12 -
張家口汽車(chē)防撞360全景找哪家
工程車(chē)360全景盲區(qū)監(jiān)測(cè)預(yù)警系統(tǒng)的效能,源于其精密而強(qiáng)大的技術(shù)架構(gòu)。其硬件基石是分布在車(chē)身關(guān)鍵位置(通常為車(chē)頭、車(chē)尾、左右后視鏡下方或車(chē)身兩側(cè))的4至6顆高性能超廣角魚(yú)眼攝像頭,這些攝像頭經(jīng)過(guò)特殊的光學(xué)設(shè)計(jì)和防護(hù)處理,具備防水防塵、抗震抗沖擊、寬溫域工作,確保在惡劣工況下持續(xù)提供穩(wěn)定清晰的原始圖像。處理單元搭載高性能圖像處理芯片和算法引擎,實(shí)時(shí)接收所有攝像頭的視頻流,執(zhí)行包括畸變矯正、視角變換、多路視頻同步、圖像拼接融合等復(fù)雜運(yùn)算,在駕駛室內(nèi)的高亮度、防眩光顯示屏上輸出無(wú)畸變、低延遲(通常≤50ms)的360度全景鳥(niǎo)瞰視圖。盲區(qū)監(jiān)測(cè)預(yù)警功能則依賴(lài)于集成在車(chē)身周?chē)暮撩撞ɡ走_(dá)(中短距)和/或超聲...
2025-09-12 -
北京機(jī)場(chǎng)工程車(chē)360全景設(shè)計(jì)
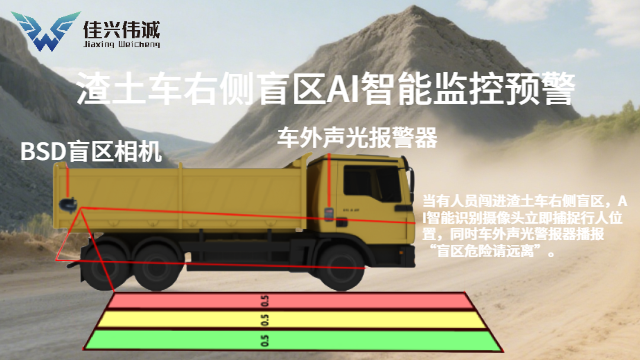
在工程車(chē)輛領(lǐng)域,佳興偉誠(chéng)推出的 “工程機(jī)械 360 全景盲區(qū)監(jiān)測(cè)預(yù)警系統(tǒng)” 效果明顯,專(zhuān)門(mén)針對(duì)挖掘機(jī)、起重機(jī)、壓路機(jī)等工程車(chē)輛的作業(yè)特點(diǎn)設(shè)計(jì)。工程車(chē)輛作業(yè)環(huán)境復(fù)雜,多為建筑工地、礦山等場(chǎng)所,人員流動(dòng)大、障礙物多,盲區(qū)隱患大,傳統(tǒng)的后視鏡和反光鏡難以滿(mǎn)足安全需求。該系統(tǒng)通過(guò)在工程車(chē)關(guān)鍵位置安裝 6-8 個(gè) AI 智能攝像頭,每個(gè)攝像頭具備人形識(shí)別功能,采集 360 度環(huán)境數(shù)據(jù),經(jīng)高性能主機(jī)算法處理,在駕駛室內(nèi) 15.6 英寸顯示屏上呈現(xiàn) 360 度全景畫(huà)面及作業(yè)范圍圖,圖中會(huì)用不同顏色標(biāo)注危險(xiǎn)區(qū)域、警戒區(qū)域和安全區(qū)域。當(dāng)有人員闖入危險(xiǎn)區(qū)域(距離車(chē)輛7米以?xún)?nèi)),智能預(yù)警功能立即啟動(dòng),AI 攝像頭快...
2025-09-12 -
張家口主動(dòng)安全360全景
佳興偉誠(chéng)科技研發(fā)的工程車(chē)輛360全景環(huán)視駕駛輔助系統(tǒng)融入人工智能(AI)技術(shù),實(shí)現(xiàn)從“看見(jiàn)周?chē)钡健袄斫怙L(fēng)險(xiǎn)”的質(zhì)變飛躍。通過(guò)在前端攝像頭或中心處理單元集成高性能AI加速芯片,系統(tǒng)能夠?qū)崟r(shí)運(yùn)行復(fù)雜的深度學(xué)習(xí)模型,對(duì)全景影像中的目標(biāo)進(jìn)行檢測(cè)、分類(lèi)與跟蹤。這雙“智能之眼”不能識(shí)別出車(chē)輛、行人、等物體,更能精確區(qū)分出靠近人員的姿態(tài)。系統(tǒng)結(jié)合雷達(dá)的測(cè)距測(cè)速數(shù)據(jù)與AI視覺(jué)的語(yǔ)義信息,構(gòu)建車(chē)輛周?chē)鷦?dòng)態(tài)環(huán)境的精細(xì)化數(shù)字孿生。基于此,其預(yù)警策略不再是簡(jiǎn)單的距離閾值觸發(fā),而是演進(jìn)為具備預(yù)測(cè)能力的主動(dòng)安全防護(hù):例如,當(dāng)系統(tǒng)識(shí)別到有行人正快速?gòu)膫?cè)后方斜進(jìn)入車(chē)輛轉(zhuǎn)彎內(nèi)輪差區(qū)域,或有人蹲在自卸車(chē)正前方輪胎附近時(shí),即使目...
2025-09-11 -
 錫林郭勒汽車(chē)防撞360全景服務(wù)商
錫林郭勒汽車(chē)防撞360全景服務(wù)商在工程建設(shè)領(lǐng)域,工程車(chē)的安全運(yùn)營(yíng)始終是重中之重,而盲區(qū)則是導(dǎo)致事故的 關(guān)鍵因素。工程車(chē) 360 全景盲區(qū)監(jiān)測(cè)預(yù)警系統(tǒng)的出現(xiàn),正是為了解決這一難題。對(duì)于體型龐大的工程車(chē)而言,駕駛員的視野存在諸多局限,車(chē)頭下方、車(chē)身側(cè)面、車(chē)尾等位置的盲區(qū)極易隱藏行人、小型車(chē)輛或障礙物,稍有不慎就可能引發(fā)碰撞事故。尤其是在建筑工地、礦山、港口等復(fù)雜作業(yè)環(huán)境中,人員與車(chē)輛混合作業(yè)頻繁,盲區(qū)風(fēng)險(xiǎn)更是被放大。這套系統(tǒng)通過(guò)分布在車(chē)輛四周的高清攝像頭,實(shí)時(shí)采集各個(gè)方位的畫(huà)面,經(jīng)過(guò)算法處理后形成一幅完整的 360 度全景影像,直觀地呈現(xiàn)在駕駛室內(nèi)的顯示屏上,讓駕駛員能夠清晰掌握車(chē)輛周?chē)?360 度的實(shí)時(shí)狀況,就像擁有了 “上帝...
2025-09-11 -
錫林郭勒北斗5G360全景設(shè)計(jì)
在塵土飛揚(yáng)、坡陡彎急、車(chē)輛設(shè)備密集的露天礦山,佳興偉誠(chéng)360全景駕駛輔助系統(tǒng)成為重型礦用自卸車(chē)的“安全之眼”。針對(duì)礦卡龐大的車(chē)身尺寸和極高的盲區(qū)風(fēng)險(xiǎn),系統(tǒng)配置超高防護(hù)等級(jí)攝像頭,分布于車(chē)頭、車(chē)頂、兩側(cè)后視鏡下方及車(chē)尾關(guān)鍵點(diǎn),無(wú)懼礦場(chǎng)惡劣的粉塵、震動(dòng)、高低溫及飛石沖擊。佳興偉誠(chéng)專(zhuān)有算法實(shí)時(shí)合成360度無(wú)死角環(huán)視影像,并將車(chē)輛龐大的輪廓線疊加于鳥(niǎo)瞰圖上,駕駛員在駕駛室即可清晰掌握車(chē)身周?chē)鷶?shù)米范圍內(nèi)所有地形起伏、鄰近設(shè)備、邊坡距離及人員活動(dòng)情況。在狹窄的排土場(chǎng)邊緣倒車(chē)卸載、蜿蜒的礦山道路會(huì)車(chē)、夜間低能見(jiàn)度條件下行駛時(shí),系統(tǒng)提供的全景視野與動(dòng)態(tài)距離警示(可選配雷達(dá)融合)是避免碾壓、碰撞、傾翻事故的生命...
2025-09-11 -
赤峰機(jī)場(chǎng)工程車(chē)360全景設(shè)計(jì)
佳興偉誠(chéng)深耕車(chē)載安全領(lǐng)域多年,其工程車(chē)360全景盲區(qū)監(jiān)測(cè)預(yù)警系統(tǒng)以“無(wú)死角監(jiān)控+AI智能預(yù)警”為關(guān)鍵,通過(guò)車(chē)身四周部署的4路210°超廣角高清攝像頭,實(shí)時(shí)采集車(chē)輛周?chē)h(huán)境圖像。系統(tǒng)采用自主研發(fā)的圖像畸變矯正算法與深度學(xué)習(xí)技術(shù),將多路影像無(wú)縫拼接成360°全景鳥(niǎo)瞰圖,消除傳統(tǒng)后視鏡盲區(qū)。在復(fù)雜施工場(chǎng)景中,駕駛員可直觀觀察車(chē)身四周5米范圍內(nèi)的行人、車(chē)輛及障礙物,配合毫米波雷達(dá)的遠(yuǎn)距離探測(cè)能力,實(shí)現(xiàn)“視覺(jué)+雷達(dá)”雙模態(tài)感知。該系統(tǒng)已成功應(yīng)用于泥頭車(chē)、攪拌車(chē)、推土機(jī)等20余類(lèi)工程車(chē)輛,在前海建設(shè)工地實(shí)測(cè)中,盲區(qū)事故率下降82%,成為行業(yè)安全標(biāo)準(zhǔn)升級(jí)的標(biāo)準(zhǔn)案例。佳興偉誠(chéng)工程車(chē)作業(yè)區(qū)域360全景AI預(yù)警系...
2025-09-11