上海專業(yè)圖像標(biāo)注
這樣的無人機(jī)智慧“眼”可以通過搭載吊艙實(shí)現(xiàn),吊艙內(nèi)置各種規(guī)格的攝像機(jī),能夠?qū)崿F(xiàn)多角度觀察。而智能化則可以在吊艙的基礎(chǔ)上植入高性能AI圖像處理板。圖像處理板能夠?qū)z像機(jī)獲取的圖像進(jìn)行AI智能分析,這樣無人機(jī)就能夠自動(dòng)識(shí)別缺陷,然后進(jìn)行信息留存、回傳。在這個(gè)領(lǐng)域,成都慧視光電可以根據(jù)需求進(jìn)行多接口圖像處理板的定制,選擇成都慧視開發(fā)的RK3588系列圖像處理板,支持選擇SDI、CVBS、LVDS、USB、cameralink等接口。RK3588擁有6.0TOPS的算力,能夠在各種復(fù)雜環(huán)境進(jìn)行穩(wěn)定工作。板卡和識(shí)別算法的強(qiáng)強(qiáng)聯(lián)合下,無論白天黑夜,無人機(jī)都可以實(shí)現(xiàn)自助巡檢,就不需要過多的人工參與。也是一種降本增效的舉措。SpeedDP 側(cè)重于數(shù)據(jù)驅(qū)動(dòng)的高性能模型定制,支持從零開始的完整模型訓(xùn)練流程;上海專業(yè)圖像標(biāo)注
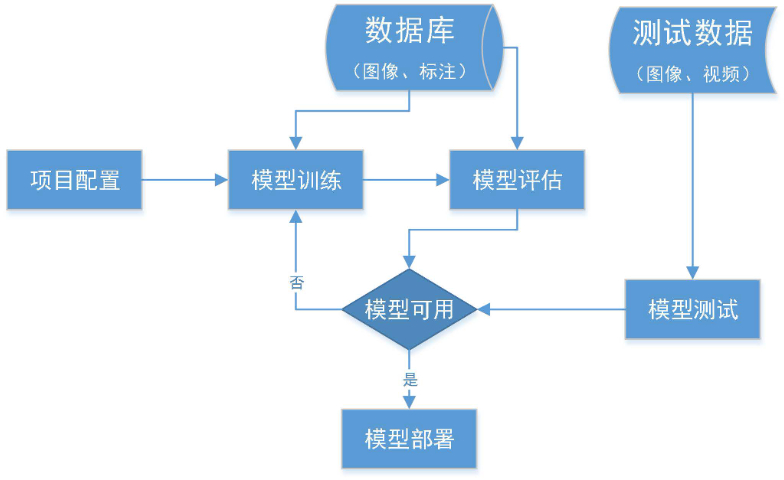
慧視光電推出的SpeedDP深度學(xué)習(xí)算法開發(fā)平臺(tái)支持labelimg數(shù)據(jù)標(biāo)注格式,用戶采集得到圖像數(shù)據(jù)后使用labelimg工具進(jìn)行數(shù)據(jù)標(biāo)注,然后將圖像文件和標(biāo)注文件按如圖2所示指定的形式存放即可直接用于模型訓(xùn)練。一般不同的業(yè)務(wù)場(chǎng)景需求對(duì)應(yīng)不同的數(shù)據(jù)和算法參數(shù)設(shè)置,慧視SpeedDP深度學(xué)習(xí)算法開發(fā)平臺(tái)采用項(xiàng)目配置的方式來對(duì)不同的業(yè)務(wù)需求進(jìn)行管理。采集數(shù)據(jù)后,能夠批量加載一定數(shù)量的數(shù)據(jù)并進(jìn)行合并后輸入模型,實(shí)時(shí)顯示訓(xùn)練記錄,并能以文件的形式保存運(yùn)行時(shí)訓(xùn)練參數(shù)。浙江圖像標(biāo)注哪里買有很多圖像需要標(biāo)注怎么辦?
利用無人機(jī)實(shí)現(xiàn)智能化識(shí)別能夠幫助我們提升許多工作效率,在很多行業(yè)都有應(yīng)用。像安防巡檢、交通管理等,飛在高空的無人機(jī)比傳統(tǒng)的地面巡邏更有視野,更能搜集掌握全局信息,再通過和地面巡邏的配合,能夠有效減少工作量。但是在無人機(jī)識(shí)別的過程中會(huì)遇到很多問題,比如當(dāng)環(huán)境變得復(fù)雜時(shí),識(shí)別的精度可能就會(huì)受到影響。AI識(shí)別算法是一種深度學(xué)習(xí)的算法,它不是一成不變的,它也需要適應(yīng)不同的環(huán)境,因此對(duì)于AI算法的訓(xùn)練也必不可少。
無人機(jī)及其相關(guān)技術(shù)的不斷發(fā)展,已經(jīng)打破了傳統(tǒng)的倉(cāng)儲(chǔ)管理方式,為倉(cāng)儲(chǔ)帶來了智能化的革新。傳統(tǒng)的倉(cāng)儲(chǔ)管理,需要人工進(jìn)行地毯式巡檢,這種方式效率低,費(fèi)時(shí)費(fèi)力。另外,對(duì)于倉(cāng)儲(chǔ)安全的監(jiān)管不能做到時(shí)效性,反應(yīng)速度也具有滯后性。而全新的無人機(jī)巡檢模式,基于先進(jìn)的圖像傳感器、遠(yuǎn)程控制技術(shù)、AI等,使得無人機(jī)能夠?qū)崿F(xiàn)高效安全的自主巡邏,無需過多的人工介入。一旦無人機(jī)檢測(cè)識(shí)別到危險(xiǎn),就能夠立即發(fā)出警報(bào),甚至可能提前預(yù)警,滯后性將得到改善。SpeedDP 專為擁有豐富數(shù)據(jù)資源的應(yīng)用場(chǎng)景設(shè)計(jì),提供全流程的模型開發(fā)體驗(yàn)。
這個(gè)過程中,采用無人機(jī)是個(gè)高效的辦法。無人機(jī)高空觀察能夠獲得更多的視野,并且針對(duì)許多人無法到達(dá)的地方,還能夠快速抵近觀察,防止驚擾。此外,更高效的措施是在無人機(jī)上加裝具備圖像處理的板卡,這時(shí)候無人機(jī)就是一個(gè)智慧眼,它能夠在算法的輔助下,對(duì)野豬等動(dòng)物進(jìn)行AI搜尋,并且具備目標(biāo)鎖定功能。當(dāng)無人機(jī)發(fā)現(xiàn)疑似目標(biāo)就可以抵近觀察,一旦確認(rèn)目標(biāo)就能夠立即鎖定跟蹤,這樣,地面圍剿人員就可以快速像區(qū)域靠攏,對(duì)野豬進(jìn)行逮捕驅(qū)逐。這樣的無人機(jī)智慧眼可以用成都慧視開發(fā)的Viztra-HE030圖像處理板來實(shí)現(xiàn),這塊板卡采用瑞芯微旗艦級(jí)芯片RK3588,算力能夠達(dá)到6.0TOPS,處理村落、樹林等復(fù)雜環(huán)境不在話下。同時(shí),針對(duì)于野生動(dòng)物目標(biāo)識(shí)別算法的AI訓(xùn)練,成都慧視還可以提供專門的AI訓(xùn)練平臺(tái)SpeedDP,通過大量的模型訓(xùn)練實(shí)現(xiàn)AI自動(dòng)圖像標(biāo)注,進(jìn)而幫助提升算法識(shí)別性能。一站式AI訓(xùn)練平臺(tái)SpeedDP。比較好的圖像標(biāo)注優(yōu)勢(shì)
如何進(jìn)行快速的圖像標(biāo)注?上海專業(yè)圖像標(biāo)注
RK3588作為瑞芯微國(guó)產(chǎn)化旗艦級(jí)芯片,用在目標(biāo)跟蹤領(lǐng)域,通常情況下跟蹤幀率都在50Hz左右,這已經(jīng)足夠滿足大多數(shù)應(yīng)用領(lǐng)域的需求。但在許多特殊領(lǐng)域,如軍備、邊防,高幀頻的視頻輸出能夠在極短的時(shí)間內(nèi)捕捉到更多的畫面,實(shí)現(xiàn)高速動(dòng)態(tài)場(chǎng)景的連續(xù)拍攝。高幀頻的目標(biāo)跟蹤則能夠獲得更多的目標(biāo)細(xì)節(jié),便于做出下一步判斷。許多中低端性能的由于算力等因素?zé)o法達(dá)到這樣的需求,但RK3588作為性能怪,6.0TOPS的算力開發(fā)潛力無限。成都慧視就針對(duì)于這樣的需求場(chǎng)景,在硬件的支持下,定制開發(fā)出能夠支撐100Hz跟蹤算法,從而打造出能夠穩(wěn)定實(shí)現(xiàn)100Hz目標(biāo)跟蹤的整合方案。上海專業(yè)圖像標(biāo)注
- 目標(biāo)跟蹤服務(wù)電話 2025-12-21
- 湖南目標(biāo)跟蹤誠(chéng)信推薦 2025-12-21
- 山西AI智能方案** 2025-12-21
- 浙江智能化目標(biāo)跟蹤 2025-12-21
- 廣東高性能目標(biāo)跟蹤 2025-12-21
- 數(shù)據(jù)目標(biāo)跟蹤多少錢 2025-12-21
- 江西電力運(yùn)維AI智能人臉識(shí)別 2025-12-21
- 人防目標(biāo)跟蹤解決 2025-12-21
- 省時(shí)省力目標(biāo)跟蹤有哪些 2025-12-21
- 西藏深度學(xué)習(xí)AI智能算法分析 2025-12-21
- 江蘇本地智慧園區(qū)網(wǎng)絡(luò)覆蓋設(shè)備要求 2025-12-21
- 浙江信息化光伏四可 2025-12-21
- 張家口數(shù)據(jù)智慧環(huán)衛(wèi)系統(tǒng)推廣 2025-12-21
- 武昌區(qū)耐用企業(yè)智慧管理平臺(tái)開發(fā)系統(tǒng) 2025-12-21
- 奉賢區(qū)耐用工業(yè)設(shè)計(jì)服務(wù)廠家電話 2025-12-21
- 業(yè)務(wù)員招新微信小程序解決方案 2025-12-21
- 定位 gps模塊 2025-12-21
- 漢南區(qū)多媒體企業(yè)通信軟件開發(fā)性價(jià)比 2025-12-21
- 杭州自然保護(hù)區(qū)滅火繩源頭廠家 2025-12-21
- 貴陽高效激光對(duì)射探測(cè)器 2025-12-21