內(nèi)蒙古工業(yè)機器人力控系統(tǒng)
生產(chǎn)安全性在精密裝配場景中尤為重要,達寬科技的機器人力控為行星齒輪裝配增添安全屏障。裝配過程中,若出現(xiàn)齒輪卡滯、工件定位偏差等異常情況,傳統(tǒng)機器人可能因持續(xù)施力造成齒輪崩齒、設(shè)備損壞,甚至引發(fā)安全隱患。達寬科技的機器人力控系統(tǒng)具備實時異常檢測功能,當監(jiān)測到力值突然超出安全范圍時,會立即觸發(fā)保護機制,控制機器人暫停動作或退回安全位置。這一機制不僅保護了精密的行星齒輪零件和裝配設(shè)備,也減少了因設(shè)備故障導(dǎo)致的生產(chǎn)中斷,為操作人員營造更安全的工作環(huán)境。借助機器人力控的感知反饋,插拔過程更平穩(wěn),保護精密接口不受損傷。內(nèi)蒙古工業(yè)機器人力控系統(tǒng)
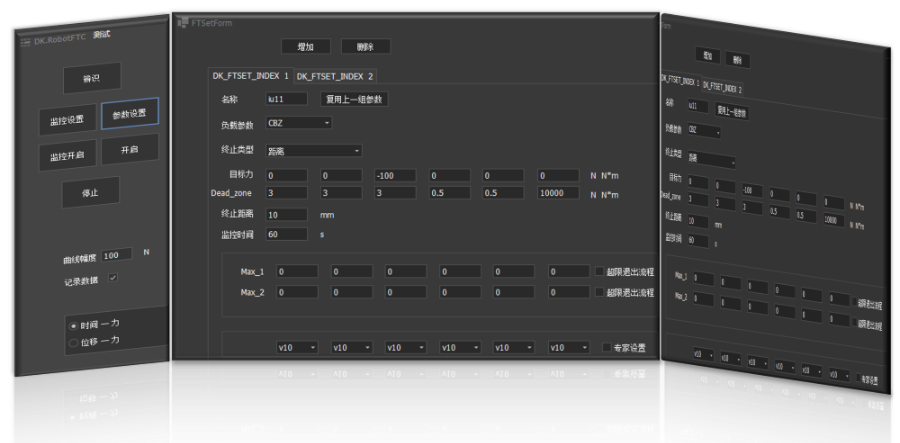
電子組裝產(chǎn)線的瓶頸常出現(xiàn)在精密部件裝配環(huán)節(jié)。引入機器人力控技術(shù)可實質(zhì)性改善生產(chǎn)節(jié)拍。在散熱模組壓合、接口端子鎖緊等工序中,機器人力控系統(tǒng)通過智能化的力軌跡規(guī)劃,大幅減少人工干預(yù)頻率。系統(tǒng)實時解析接觸阻力變化趨勢,自動優(yōu)化下壓力度和角度,保持產(chǎn)線連續(xù)運行。達寬科技的機器人力控解決方案支持主流SMT設(shè)備協(xié)議,用戶可便捷集成到現(xiàn)有生產(chǎn)線。生產(chǎn)主管反饋,應(yīng)用機器人力控后,PCBA裝配工位等待時間減少,工序銜接更緊密,整體設(shè)備綜合效率得到改善。新疆機器人力控方案達寬科技機器人力控圖形化編程模塊,快速設(shè)定齒輪組裝配參數(shù)。

機器人力控提升電機裝配安全防護等級
裝配過程的安全防護對精密電機組件至關(guān)重要。機器人力控技術(shù)為此建立了主動保障體系。系統(tǒng)持續(xù)監(jiān)測裝配過程中的三維力矢量變化,當檢測到異常阻力(如部件干涉、錯位或卡滯),機器人力控系統(tǒng)會立即觸發(fā)安全響應(yīng),限制輸出力矩或啟動緩?fù)顺绦颉__寬科技的機器人力控方案配置多重防護策略。實踐證明,這種基于實時力感知的安全機制,減少了貴重電磁組件損傷和設(shè)備意外停機的風(fēng)險,營造了更可控的自動化作業(yè)環(huán)境。
在表面處理領(lǐng)域,復(fù)雜工件的打磨、拋光等工序長期依賴人工操作,不僅面臨操作強度大、環(huán)境適應(yīng)性有限等問題,還難以應(yīng)對多樣化的工藝需求。機器人力控技術(shù)的出現(xiàn),為這些痛點提供了全新的解決思路。機器人力控通過實時感知接觸力的變化,讓機器人在作業(yè)過程中像人手一樣靈活調(diào)整動作,輕松適配不同材質(zhì)、不同形狀的工件表面。達寬科技深耕機器人力控領(lǐng)域,憑借對表面處理工藝的深刻理解,將機器人力控技術(shù)與實際生產(chǎn)場景深度融合,幫助企業(yè)突破傳統(tǒng)作業(yè)模式的限制,讓機器人在表面處理任務(wù)中發(fā)揮更大價值。達寬科技機器人力控,助力電池線束裝配,節(jié)省成本與時間。

在線束裝配領(lǐng)域,細小的接頭對接、復(fù)雜的路徑排布等工序長期依賴人工操作,不僅面臨操作精度要求高、重復(fù)勞動強度大的問題,還容易因人員狀態(tài)波動影響裝配效果。力控系統(tǒng)的引入為這些挑戰(zhàn)提供了新的解決路徑。力控系統(tǒng)能實時感知機器人與線束、接頭之間的接觸力度,讓機器人在插拔、纏繞等動作中靈活調(diào)整力度,適配不同規(guī)格線束的裝配需求。達寬科技深耕力控技術(shù)研發(fā),結(jié)合線束裝配的工藝特點,將力控系統(tǒng)與機器人操作深度融合,幫助企業(yè)打破傳統(tǒng)人工裝配的局限,讓機器人在精細的線束裝配任務(wù)中發(fā)揮穩(wěn)定作用。達寬科技機器人力控開放SDK,開發(fā)者自由拓展場景,教育科研創(chuàng)新觸手可及。黑龍江機器人力控軟件
達寬科技機器人力控融合安全算法,遇邊框即刻減速回退,守護高層作業(yè)安全無憂。內(nèi)蒙古工業(yè)機器人力控系統(tǒng)
電機齒輪作為電機傳動系統(tǒng)的關(guān)鍵部件,其產(chǎn)品一致性直接關(guān)系到電機的性能和可靠性。達寬科技的機器人力控系統(tǒng)在保障電機齒輪裝配一致性方面發(fā)揮著作用。在裝配過程中,力控系統(tǒng)為每一個齒輪的安裝提供了標準化的力控參數(shù)。從齒輪與軸的初步接觸,到終達到預(yù)定的嚙合力矩,整個過程中的受力曲線都被嚴格控制在系統(tǒng)設(shè)定的范圍內(nèi)。相比之下,傳統(tǒng)裝配方式由于缺乏實時受力反饋,很難避免因力度差異導(dǎo)致的齒輪變形和嚙合偏差。而力控系統(tǒng)的應(yīng)用,使得電機齒輪的裝配質(zhì)量不再依賴于工人的經(jīng)驗和操作技巧,而是由精確的力控參數(shù)來保障。這種基于物理量反饋的質(zhì)量控制方式,為電機齒輪的大規(guī)模、高質(zhì)量生產(chǎn)提供了堅實的技術(shù)支撐,幫助企業(yè)在激烈的市場競爭中以的產(chǎn)品一致性脫穎而出。內(nèi)蒙古工業(yè)機器人力控系統(tǒng)
- 浙江工業(yè)機器人力控系統(tǒng)廠家 2025-12-16
- 重慶機器人力控供應(yīng)商 2025-12-16
- 吉林協(xié)作機器人力控調(diào)試 2025-12-16
- 中國香港機器人力控系統(tǒng)推薦 2025-12-16
- 湖北簡控力控系統(tǒng)原理 2025-12-16
- 浙江達寬科技力控系統(tǒng)調(diào)試 2025-12-16
- 天津機器人力控優(yōu)勢 2025-12-16
- 西藏機器人力控打磨 2025-12-16
- 湖北協(xié)作機器人力控技術(shù)指導(dǎo) 2025-12-16
- 遼寧機器人力控檢測 2025-12-16
- 奉賢區(qū)什么廣告設(shè)計 2025-12-16
- 北京境外旅行翻譯器批發(fā)價格 2025-12-16
- 安徽實景BIM智能運維平臺 2025-12-16
- 滁州多模態(tài)交互型網(wǎng)站搭建軟件 2025-12-16
- 鼓樓區(qū)數(shù)碼復(fù)合機辦公設(shè)備租賃長期租賃 2025-12-16
- 江蘇金融行業(yè)時間同步裝置配置怎么選 2025-12-16
- 蘇州教學(xué)用紅外觸控器哪家便宜 2025-12-16
- 即插即用電子白板代加工 2025-12-16
- 長寧區(qū)綜合自動化設(shè)備檢修 2025-12-16
- 自動化無人機定制改造什么品牌 2025-12-16