山東機器人力控設計
隨著服務器技術的不斷升級,其結構設計和裝配工藝也在持續迭代,對裝配設備的適應性提出了更高要求。機器人力控憑借良好的靈活性和可調節性,能夠快速適配不同型號、不同規格服務器的裝配需求。無論是小型服務器的緊湊部件裝配,還是大型服務器的多模塊對接,機器人力控都能通過參數調整實現高效適配。達寬科技始終聚焦機器人力控技術的創新優化,根據服務器行業的發展趨勢,持續完善方案的適配能力,提供定制化的機器人力控配置,幫助企業快速響應產品迭代需求,推動服務器裝配從傳統模式向智能化、柔性化方向升級,為行業發展注入技術動力。達寬科技機器人力控兼容多種清潔劑與玻璃,物業無需重復采購,降低綜合成本。山東機器人力控設計
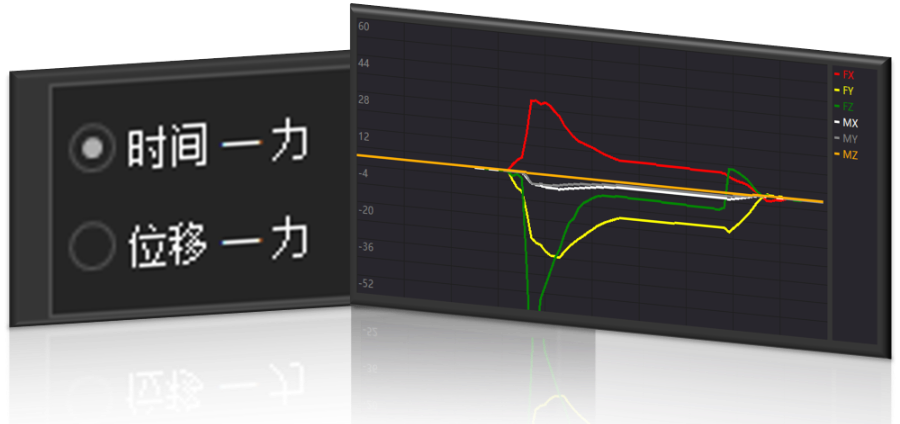
機器人力控技術為線束裝配帶來的效率提升。在傳統線束生產過程中,人工操作往往需要反復調整線纜位置和端子角度,耗費大量時間。而機器人力控系統通過實時力反饋和自適應控制,能夠自動感知線纜插入時的阻力變化,動態調整機械臂的運動軌跡和力度。在汽車線束生產線上,這種智能化的裝配方式使單工位作業時間明顯縮短,工人可以將更多精力放在質量檢查等關鍵環節上。
線束連接的可靠性直接影響電氣系統的整體性能。達寬科技的機器人力控系統配備了高精度力傳感器,能夠實時監測壓接過程中的力度變化,并在出現異常時立即報警。在新能源高壓線束生產中,該系統有效避免了因壓力不足導致的接觸不良或壓力過大造成的端子變形。 甘肅協作機器人力控精密裝配機器人力控降低了操作復雜度,用戶能更便捷地部署雙臂機器人進行作業。
生產安全性在精密裝配場景中尤為重要,達寬科技的機器人力控為行星齒輪裝配增添安全屏障。裝配過程中,若出現齒輪卡滯、工件定位偏差等異常情況,傳統機器人可能因持續施力造成齒輪崩齒、設備損壞,甚至引發安全隱患。達寬科技的機器人力控系統具備實時異常檢測功能,當監測到力值突然超出安全范圍時,會立即觸發保護機制,控制機器人暫停動作或退回安全位置。這一機制不僅保護了精密的行星齒輪零件和裝配設備,也減少了因設備故障導致的生產中斷,為操作人員營造更安全的工作環境。
在生產效率優化方面,機器人力控展現出實用價值。傳統電機齒輪裝配中,操作人員需針對不同型號齒輪反復調試機器人程序,校準工裝定位,不僅耗費時間,還難以適應多規格、快換產的生產需求。達寬科技的機器人力控系統通過實時力反饋調節,賦予機器人自主適應能力。面對不同批次齒輪的細微尺寸差異,或裝配工位的輕微偏移,機器人力控能自動修正運動路徑和接觸力度,減少停機調試環節。裝配流程從 “依賴人工調整” 轉為 “系統自主適配”,讓生產線的連續運轉更有保障,間接提升整體生產節奏。機器人力控裝配電池防爆閥,優化流程,提升整體生產效率。

電子組裝產線的瓶頸常出現在精密部件裝配環節。引入機器人力控技術可實質性改善生產節拍。在散熱模組壓合、接口端子鎖緊等工序中,機器人力控系統通過智能化的力軌跡規劃,大幅減少人工干預頻率。系統實時解析接觸阻力變化趨勢,自動優化下壓力度和角度,保持產線連續運行。達寬科技的機器人力控解決方案支持主流SMT設備協議,用戶可便捷集成到現有生產線。生產主管反饋,應用機器人力控后,PCBA裝配工位等待時間減少,工序銜接更緊密,整體設備綜合效率得到改善。機器人力控支持組件快速更換,延長設備生命周期。湖北工業機器人力控方案
機器人力控有助于減少表面刮傷或磨損風險,維持被處理對象的品質。山東機器人力控設計
機器人力控提升電機裝配安全防護等級
裝配過程的安全防護對精密電機組件至關重要。機器人力控技術為此建立了主動保障體系。系統持續監測裝配過程中的三維力矢量變化,當檢測到異常阻力(如部件干涉、錯位或卡滯),機器人力控系統會立即觸發安全響應,限制輸出力矩或啟動緩退程序。達寬科技的機器人力控方案配置多重防護策略。實踐證明,這種基于實時力感知的安全機制,減少了貴重電磁組件損傷和設備意外停機的風險,營造了更可控的自動化作業環境。 山東機器人力控設計
- 河南達寬科技力控系統原理 2025-12-22
- 山西機器人力控裝配零部件 2025-12-22
- 湖北柔性力控裝配線 2025-12-22
- 柔性裝配接頭 2025-12-22
- 機器人電機裝配解決方案 2025-12-22
- 安徽柔性裝配線 2025-12-22
- 福建自動化裝配流水線 2025-12-21
- 湖北工業力控系統配置 2025-12-21
- 浙江智能柔性力控系統原理 2025-12-21
- 機器人零部件裝配解決方案 2025-12-21
- 上海smt元件封裝0402 2025-12-22
- 淮安智慧工地供應商 2025-12-22
- 初中物理智能系統下載推薦 2025-12-22
- 廣東社區邊緣計算視頻分析 2025-12-22
- qfn封裝焊接 2025-12-22
- 徐州針紡織品銷售推廣 2025-12-22
- 公網時鐘同步裝置價格 2025-12-22
- 初中物理上課輔助系統排名 2025-12-22
- 廣東K4A8G085WCBCWE存儲芯片專業團隊 2025-12-22
- 徐匯區國內會議及展覽服務 2025-12-22