青海龍門型重負載直交機械手
直交機械手在特種環境下的應用挑戰與解決方案:在一些特種環境下,如高溫、低溫、高濕度、強腐蝕、高輻射等,直交機械手的應用面臨諸多挑戰。在高溫環境中,機械手的材料性能可能會發生變化,電子元件也可能因過熱而出現故障。對此,可采用耐高溫材料制作機械部件,并為電氣系統配備有效的散熱裝置。在低溫環境下,潤滑油可能變稠,影響機械部件的運動靈活性,此時需要選用低溫性能良好的潤滑油,并對機械手進行適當的保溫措施。在強腐蝕環境中,選擇耐腐蝕材料以及對機械手表面進行特殊防護處理是關鍵。針對高輻射環境,則要采用具有抗輻射性能的材料和電子元件,并對機械手進行特殊的屏蔽設計。通過這些針對性的解決方案,直交機械手能夠在特種環境下穩定運行,拓展其應用領域,滿足特殊行業的生產需求。 忠實反映客戶意見設計的直交機械手,好用實用,備受青睞!青海龍門型重負載直交機械手
直交機械手在未來制造業中的戰略地位:在未來制造業中,直交機械手將占據極為重要的戰略地位。隨著制造業向高質量化、智能化、綠色化方向發展,對自動化生產設備的需求將持續增長。直交機械手憑借其高精度、高速度、高可靠性以及靈活的編程操控能力,能夠滿足未來制造業對生產效率、產品質量和個性化定制的嚴格要求。無論是在新興的智能制造產業,還是在傳統制造業的轉型升級過程中,直交機械手都將成為實現自動化生產、提高企業核心競爭力的關鍵裝備。它將推動制造業生產模式的變革,促進產業結構優化升級,為未來制造業的可持續發展提供強大動力,成為支撐制造業邁向高質量發展的重要基石。 中國香港螺桿型直交機械手模具廠家貼片工作里,直交機械手準確貼片,位置無誤,保障生產!
直交機械手的驅動與控制系統:驅動系統堪稱直交機械手的“動力心臟”,常見的驅動方式包括電機驅動與氣動驅動。電機驅動中,伺服電機憑借其準確的轉速與位置控制能力,成為主流選擇,能夠使機械手實現微米級別的定位精度,滿足精密裝配、電子加工等行業的高要求。氣動驅動則以其響應速度快、成本較低的特點,在一些對精度要求相對不高、但追求快速動作的場合得到應用,如物料搬運的初級階段。控制系統則像是機械手的“大腦”,通過編寫特定的程序,能夠精確控制驅動系統的運行,協調各軸的運動,實現復雜的動作組合與任務流程。同時,先進的控制系統還具備故障診斷、參數調整等功能,方便操作人員進行設備維護與優化。
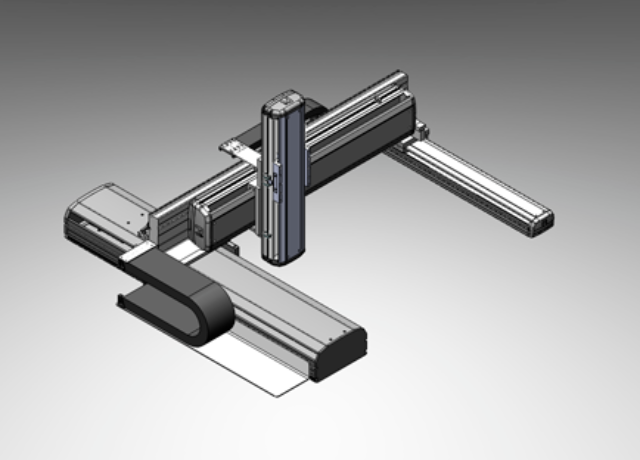
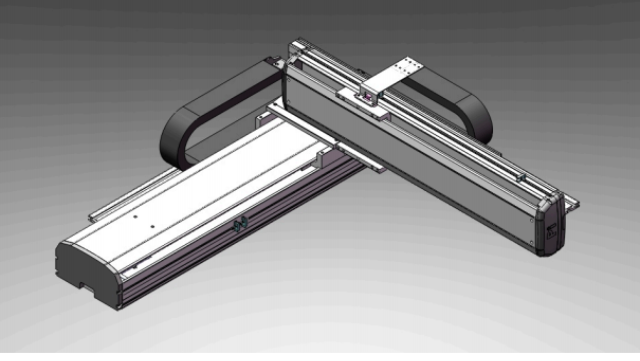
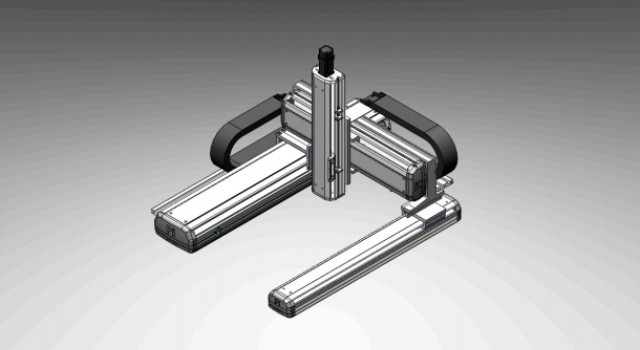
直交機械手通常由X、Y、Z三個軸組成,通過這三個軸的協同運動,實現機械手在三維空間內的精確定位。其結構設計遵循直角坐標系原理,各軸相互垂直,使得運動路徑清晰、簡單,便于編程與控制。以常見的懸臂式直交機械手為例,X軸一般負責水平方向的左右移動,Y軸實現前后位移,Z軸則完成垂直方向的升降動作。這種結構設計使得機械手能夠靈活地在工作區域內穿梭,準確地到達目標位置,廣泛應用于各類自動化生產線,如電子制造中的元件貼片、機械加工中的物料搬運等場景,為高效生產提供了基礎保障。直交機械手的構造包含多個關鍵組件。滾珠絲桿是實現高精度直線運動的重要部件,它將回轉運動轉化成直線運動或將直線運動轉化為回轉運動,具有高精度、高效率、高剛性等特點。直線導軌則為機械手的運動提供精確導向,保證運動的平穩性和重復性,能有效承受來自不同方向的載荷。強度高的鋁合金型材構成了機械手的框架主體,其質量輕、強度高,既降低了整體重量,利于提高運動速度,又確保了結構的穩定性。此外,聯軸器用于連接電機與絲桿等部件,傳遞扭矩,保障動力的有效傳輸,這些組件協同工作,賦予了直交機械手良好的性能。 打磨作業時,直交機械手平穩打磨,表面光滑,工藝精湛!
直交機械手的安裝與調試是確保其正常運行的重要環節。在安裝前,需要對安裝現場進行清理和準備,確保安裝平臺平整、穩固。首先,將機械手的支架按照設計要求安裝在工作臺上,并進行水平和垂直度調整,保證支架安裝牢固。然后,依次安裝機械臂、導軌、滑塊、驅動裝置和傳動裝置等部件,注意各部件的安裝順序和連接方式,確保安裝正確無誤。安裝完成后,進行電氣連接,將控制器、驅動器、傳感器等設備的線纜連接好,并檢查線路是否存在短路、斷路等問題。在調試階段,首先進行空載試運行,通過控制系統發送簡單的運動指令,檢查機械手各軸的運動是否平穩、順暢,傳感器反饋是否正常。然后,逐漸增加負載,進行負載試運行,調整控制器的參數,使機械手的運動精度、速度和穩定性達到設計要求。而后,進行實際工作任務的模擬測試,對機械手的性能進行整體評估和優化。 性價比高的直坐標機械手,造價低于同等負重關節機器人!青海龍門型重負載直交機械手
螺桿型直交機械手,以高傳動精度實現準確操作,穩定可靠,豈會有誤?青海龍門型重負載直交機械手
直交機械手的精度控制技術精度是直交機械手的關鍵性能指標之一。為實現高精度控制,一方面在機械結構上采用高精度的滾珠絲桿、直線導軌等部件,并嚴格控制加工精度和裝配精度,減少機械間隙帶來的誤差。另一方面,在控制系統中運用先進的算法和傳感器技術。例如,通過高精度的編碼器實時監測電機的旋轉角度,進而精確計算機械手的位置,當檢測到位置偏差時,控制系統迅速做出調整,確保機械手始終按照預設軌跡運動。此外,還可采用誤差補償技術,對機械結構的固有誤差以及運行過程中因溫度變化、負載變化等因素產生的誤差進行補償,從而進一步提高直交機械手的定位精度,滿足對精度要求極高的應用場景,如精密儀器制造、生物醫療設備生產等。 青海龍門型重負載直交機械手
- 上海工業卷板加工聯系方式 2025-12-23
- 重慶小型自動噴涂線加工廠 2025-12-23
- 安裝寵物X光機加工廠 2025-12-23
- 吳中區安裝激光加工設備按需定制 2025-12-23
- 云南螺旋板式換熱器設備價格 2025-12-23
- KME頂置式房車空調供應商 2025-12-23
- 天津電動耐磨防腐修復 2025-12-23
- 貴州35kv智能監控系統發展 2025-12-23
- 吉林起艇絞車廠家 2025-12-23
- 吉林精密型press-fit免焊插針設備5G通訊 2025-12-23