-
 河南快速圖像標(biāo)注應(yīng)用
河南快速圖像標(biāo)注應(yīng)用圖像識別方法可以分為兩大類,模型方法和搜索方法。模型方法是在業(yè)界研究和使用比較多的方法。模型的方法是試圖通過一些已知“標(biāo)簽”的圖像,通過機(jī)器學(xué)習(xí)的各種方法來學(xué)習(xí)一個描述這些標(biāo)簽的“模型”,從而,對于一個新的未知圖像,經(jīng)過這個模型判斷出其應(yīng)該具有的標(biāo)簽。基于搜索的方法是在大數(shù)據(jù)時代才出現(xiàn)的方法,其基礎(chǔ)是將已知標(biāo)簽的圖像數(shù)據(jù)建成一個可以進(jìn)行高效率檢索的數(shù)據(jù)庫,稱為圖像索引。通常需要大量的圖像來建索引,但圖像的標(biāo)簽可以有少量的噪聲。那么,對一副待測圖像,我們到這個數(shù)據(jù)庫中去找與其相同或者相似的若干圖像,然后綜合這些圖像的標(biāo)簽來預(yù)測待測圖像的標(biāo)簽。SmartDP和SpeedDP有什么不同?河南快速圖像...
2025-12-11 -
 廣東信息化圖像標(biāo)注有哪些
廣東信息化圖像標(biāo)注有哪些SpeedDP作為一個低門檻的深度學(xué)習(xí)算法開發(fā)平臺,能夠為使用者提供從數(shù)據(jù)標(biāo)注、模型訓(xùn)練、測試驗證到RockChip嵌入式硬件平臺模型部署的可視化AI開發(fā)功能。目前,SpeedDP提供網(wǎng)頁端和移動端兩種選擇,網(wǎng)頁端可以在局域網(wǎng)使用,而移動端能夠快速直觀的驗證所開發(fā)的不同算法在移動端部署時的實際效果,使用起來更加便捷。SpeedDP也是一個運行在移動設(shè)備上的視覺算法測試工具集,支持的主要任務(wù)功能包括圖像分類、目標(biāo)檢測、多目標(biāo)跟蹤,主要的部署平臺是RockChip嵌入式硬件平臺包括RK3399pro、RK3588等。軟件可運行于Windows或Linux操作系統(tǒng),來幫助使用者完成自動標(biāo)注、AI算法...
2025-12-11 -
 江蘇信息化圖像標(biāo)注應(yīng)用
江蘇信息化圖像標(biāo)注應(yīng)用物體的識別主要指的是對三維世界的客體及環(huán)境的感知和認(rèn)識,屬于高級的計算機(jī)視覺范疇。它是以數(shù)字圖像處理與識別為基礎(chǔ)的結(jié)合人工智能、系統(tǒng)學(xué)等學(xué)科的研究方向,其研究成果被廣泛應(yīng)用在各種工業(yè)及探測機(jī)器人上。隨著計算機(jī)及信息技術(shù)的迅速發(fā)展,圖像識別技術(shù)的應(yīng)用逐漸擴(kuò)大到諸多領(lǐng)域,尤其是在面部及指紋識別、衛(wèi)星云圖識別及臨床醫(yī)療診斷等多個領(lǐng)域日益發(fā)揮著重要作用。通常圖像識別技術(shù)主要是指采用計算機(jī)按照既定目標(biāo)對捕獲的系統(tǒng)前端圖片進(jìn)行處理,在日常生活中圖像識別技術(shù)的應(yīng)用也十分普遍,比如車牌捕捉、商品條碼識別及手寫識別等。隨著該技術(shù)的逐漸發(fā)展并不斷完善,未來將具有更加廣泛的應(yīng)用領(lǐng)域。圖像標(biāo)注的效率很低怎么辦?江蘇信...
2025-12-10 -
 青海國產(chǎn)化圖像標(biāo)注大概價格
青海國產(chǎn)化圖像標(biāo)注大概價格物體的識別主要指的是對三維世界的客體及環(huán)境的感知和認(rèn)識,屬于高級的計算機(jī)視覺范疇。它是以數(shù)字圖像處理與識別為基礎(chǔ)的結(jié)合人工智能、系統(tǒng)學(xué)等學(xué)科的研究方向,其研究成果被廣泛應(yīng)用在各種工業(yè)及探測機(jī)器人上。隨著計算機(jī)及信息技術(shù)的迅速發(fā)展,圖像識別技術(shù)的應(yīng)用逐漸擴(kuò)大到諸多領(lǐng)域,尤其是在面部及指紋識別、衛(wèi)星云圖識別及臨床醫(yī)療診斷等多個領(lǐng)域日益發(fā)揮著重要作用。通常圖像識別技術(shù)主要是指采用計算機(jī)按照既定目標(biāo)對捕獲的系統(tǒng)前端圖片進(jìn)行處理,在日常生活中圖像識別技術(shù)的應(yīng)用也十分普遍,比如車牌捕捉、商品條碼識別及手寫識別等。隨著該技術(shù)的逐漸發(fā)展并不斷完善,未來將具有更加廣泛的應(yīng)用領(lǐng)域。SmartDP和SpeedDP哪...
2025-12-10 -
 江蘇圖像標(biāo)注有哪些
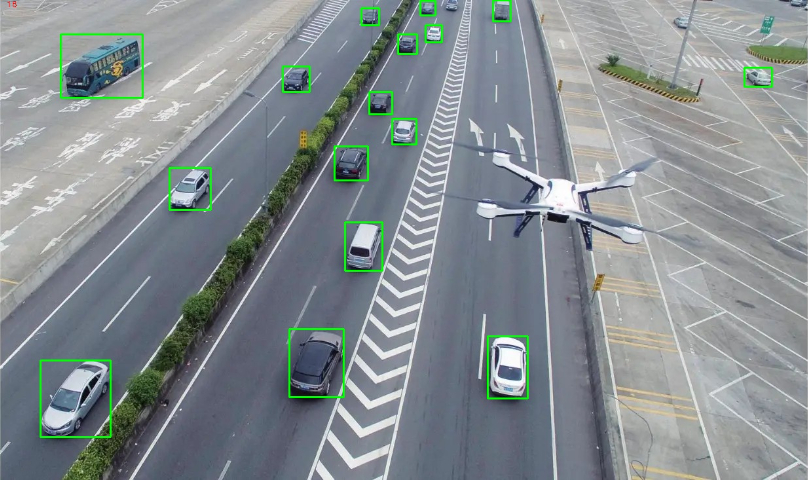
江蘇圖像標(biāo)注有哪些無人機(jī)的智能化是推動低空經(jīng)濟(jì)發(fā)展的重要引擎,打造智能無人機(jī)需要通信、控制、傳感器等多種技術(shù)的共同作用,其中圖像處理板的目標(biāo)檢測識別技術(shù)能夠在智慧巡檢、智慧交通管理、智慧河湖巡查等領(lǐng)域有著積極作用。在成都慧視開發(fā)的多款圖像處理板中,Viztra-LE026以小型化、低功耗的特點深受行業(yè)青睞。Viztra-LE026圖像處理板采用了全國產(chǎn)化芯片RV1126,板卡外形呈圓形設(shè)計,尺寸為Φ38mm*12mm,重量12g,雖然小巧,但是算力可達(dá)2.0TOPS,能夠憑借1路MIPI視頻輸入和1路DVP視頻輸入實現(xiàn)對目標(biāo)實時自主檢測、識別,并自動或手動鎖定跟蹤人、車、船等目標(biāo)。SpeedDP的模型生成模式是...
2025-12-10 -
江西專業(yè)圖像標(biāo)注哪里買
無人機(jī)在軍備領(lǐng)域有著突出作用,它不僅能幫助進(jìn)行信息偵查,還能進(jìn)行智能炮彈高空精細(xì)打擊。其中,在智能精細(xì)打擊領(lǐng)域,少不了人工智能的參與。通過人工智能的控制分析,能夠?qū)崿F(xiàn)對打擊目標(biāo)的AI識別。選擇這樣的方式,能夠減少末端打擊時對方電子干擾的影響,盡可能保證無人機(jī)的重復(fù)使用,圖像處理設(shè)備顯然比無人機(jī)本身更加經(jīng)濟(jì)。除了硬件方面,要實現(xiàn)這樣的精細(xì)打擊,算法的能力至關(guān)重要。在實際應(yīng)用落地之前就需要大量的模擬試驗來驗證算法的識別能力,這個過程周期不可估量。傳統(tǒng)方式下,需要大量的外場測試驗證,整個流程繁瑣費時費力。而這個工具的出現(xiàn),則很好的優(yōu)化了這個過程。SmartDP適用于無數(shù)據(jù)集、需要快速部署的場景。江西...
2025-12-10 -
 四川比較好的圖像標(biāo)注哪里買
四川比較好的圖像標(biāo)注哪里買在智慧農(nóng)業(yè)領(lǐng)域,當(dāng)無人機(jī)掛載吊艙飛行時,攝像頭就能自動獲取作物狀態(tài),并加以分析輸出相應(yīng)數(shù)據(jù),能夠讓管理者更好地了解整體狀況。在交通領(lǐng)域,將AI算法賦能路邊的攝像頭,能夠?qū)崿F(xiàn)人流量、車流量的智能統(tǒng)計,為交通管理部門提供詳細(xì)的車流數(shù)據(jù),從而為出臺緩解交通壓力的措施提供數(shù)據(jù)支撐。AI算法使用大量的訓(xùn)練數(shù)據(jù)集來不斷提升自身的識別能力。即使是十分復(fù)雜的照片、特征、特征或物體,也可以使用機(jī)器學(xué)習(xí)算法或邏輯來找到。特殊需求的算法定制怎么做?四川比較好的圖像標(biāo)注哪里買無人裝備作戰(zhàn)狼群,有“狼”負(fù)責(zé)偵查,有“狼”負(fù)責(zé)打擊,而有的“狼”則負(fù)責(zé)后勤保障,這種無人裝備集群作戰(zhàn)能夠有效輔助特種作戰(zhàn)。“機(jī)器狼”的升級之所...
2025-12-09 -
 黑龍江圖像標(biāo)注產(chǎn)品
黑龍江圖像標(biāo)注產(chǎn)品多目標(biāo)跟蹤是指在連續(xù)的圖像中,通過目標(biāo)檢測算法識別出每一幀中的目標(biāo),并在時間上跟蹤它們的位置和狀態(tài)。但目標(biāo)會不斷發(fā)生尺度、形變、遮擋等變化,而且還會有目標(biāo)出現(xiàn)和消失的情況,再加上視頻采集端的相機(jī)所處環(huán)境可能受到外界影響導(dǎo)致抖動的情況(例如無人機(jī)高空檢測),就會給多目標(biāo)跟蹤造成一定的困難。由于我們不能控制目標(biāo),所以只能從視頻采集端維護(hù)跟蹤的穩(wěn)定性。因此,成都慧視針對于多目標(biāo)檢測跟蹤抖動丟失的優(yōu)化方法是:1.改進(jìn)目標(biāo)檢測,使用更加魯棒的目標(biāo)檢測算法。2.增強(qiáng)特征描述,利用深度學(xué)習(xí)提取更高級別的語義特征,這些特征對于小范圍內(nèi)的視角變化具有更好的不變性3.改進(jìn)運動模型,在算法中加入對攝像頭運動的估計,...
2025-12-09 -
 廣東國產(chǎn)化圖像標(biāo)注優(yōu)勢
廣東國產(chǎn)化圖像標(biāo)注優(yōu)勢首先攝像機(jī)采用的是可見光高清攝像機(jī),具備1920*1080的分辨率,系統(tǒng)視場31.11°×17.8°,其中搜索視場15.8°×15.8°(1080P像素)。而圖像處理則采用慧視開發(fā)的RV1126高性能圖像處理板,之所以采用這塊板卡,一方面得益于其低功耗、微型外觀的設(shè)計,非常契合“智慧眼”這樣對于空間要求嚴(yán)格的應(yīng)用場景;另一方面RV1126具備2.0TOPS的算力,在國產(chǎn)化方面也十分完整,安全性十足。兩者結(jié)合,就能夠形成重量不超過100g的“智慧眼”。在算法的作用下,能夠達(dá)到≥50Hz的跟蹤幀率,≥25Hz的檢測幀率,實現(xiàn)捕獲4m*4m目標(biāo)超過800m、6m*6m目標(biāo)超過1000m。這就是“機(jī)器...
2025-12-09 -
 江蘇專業(yè)圖像標(biāo)注哪里買
江蘇專業(yè)圖像標(biāo)注哪里買深度學(xué)習(xí)是機(jī)器學(xué)習(xí)的一個分支,只在近十年內(nèi)才得到廣泛的關(guān)注與發(fā)展。它與機(jī)器學(xué)習(xí)不同的,它模擬我們?nèi)祟愖约喝プR別人臉的思路。比如,神經(jīng)學(xué)家發(fā)現(xiàn)了我們?nèi)祟愒谡J(rèn)識一個東西、觀察一個東西的時候,邊緣檢測類的神經(jīng)元先反應(yīng)比較大,也就是說我們看物體的時候永遠(yuǎn)都是先觀察到邊緣。就這樣,經(jīng)過科學(xué)家大量的觀察與實驗,總結(jié)出人眼識別的模式是基于特殊層級的抓取,從一個簡單的層級到一個復(fù)雜的層級,這個層級的轉(zhuǎn)變是有一個抽象迭代的過程的。深度學(xué)習(xí)就模擬了我們?nèi)祟惾ビ^測物體這樣一種方式,首先拿到互聯(lián)網(wǎng)上海量的數(shù)據(jù),拿到以后才有海量樣本,把海量樣本抓取過來做訓(xùn)練,抓取到重要特征,建立一個網(wǎng)絡(luò),因為深度學(xué)習(xí)就是建立一個多層的...
2025-12-09 -
 浙江多系統(tǒng)適配圖像標(biāo)注多少錢
浙江多系統(tǒng)適配圖像標(biāo)注多少錢多目標(biāo)跟蹤是指在連續(xù)的圖像中,通過目標(biāo)檢測算法識別出每一幀中的目標(biāo),并在時間上跟蹤它們的位置和狀態(tài)。但目標(biāo)會不斷發(fā)生尺度、形變、遮擋等變化,而且還會有目標(biāo)出現(xiàn)和消失的情況,再加上視頻采集端的相機(jī)所處環(huán)境可能受到外界影響導(dǎo)致抖動的情況(例如無人機(jī)高空檢測),就會給多目標(biāo)跟蹤造成一定的困難。由于我們不能控制目標(biāo),所以只能從視頻采集端維護(hù)跟蹤的穩(wěn)定性。因此,成都慧視針對于多目標(biāo)檢測跟蹤抖動丟失的優(yōu)化方法是:1.改進(jìn)目標(biāo)檢測,使用更加魯棒的目標(biāo)檢測算法。2.增強(qiáng)特征描述,利用深度學(xué)習(xí)提取更高級別的語義特征,這些特征對于小范圍內(nèi)的視角變化具有更好的不變性3.改進(jìn)運動模型,在算法中加入對攝像頭運動的估計,...
2025-12-09 -
廣西比較好的圖像標(biāo)注哪里買
無人機(jī)能夠通過高空拍攝快速獲取大范圍、多角度的地面信息。但是傳統(tǒng)的攝像頭只能獲取視頻數(shù)據(jù),對于許多需要進(jìn)行數(shù)據(jù)分析的行業(yè)來說顯然不夠智能化,從無人機(jī)視頻數(shù)據(jù)中快速獲取提煉大量有價值的信息,不僅能夠提升工作效率,還能夠減少不小的成本支出。這就是無人機(jī)的AI識別能力。通過識別算法,在無人機(jī)工作時就對目標(biāo)范圍進(jìn)行AI檢測識別,從而提煉所需信息。這就需要對無人機(jī)進(jìn)行智能化改造,可以在傳統(tǒng)無人機(jī)吊艙中植入成都慧視開發(fā)的高性能AI圖像處理板,如利用RK3588深度開發(fā)而成的Viztra-HE030圖像處理板,6.0TOPS的算力能夠快速處理無人機(jī)識別到的復(fù)雜畫面信息,這樣就有了硬件基礎(chǔ),剩下的就需要對自身...
2025-12-09 -
 貴州省時省力圖像標(biāo)注
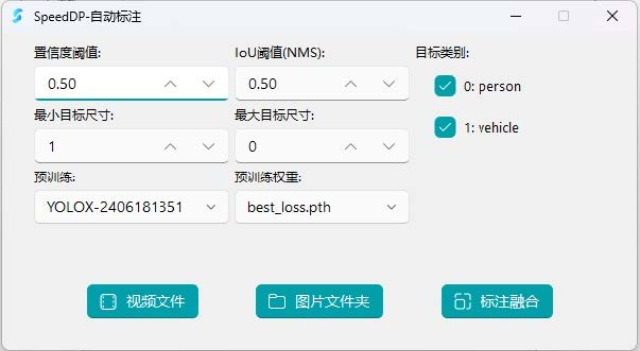
貴州省時省力圖像標(biāo)注SpeedDP作為一個服務(wù)型AI平臺,它能提供從數(shù)據(jù)標(biāo)注、模型訓(xùn)練、測試驗證到RockChip嵌入式硬件平臺模型部署的可視化AI開發(fā)功能。平臺所需算法并不是固定的,使用者可以根據(jù)自身實際應(yīng)用場景進(jìn)行AI算法的定制化開發(fā),例如平臺經(jīng)過不斷的迭代,目前能夠支持YOLOv8系列算法進(jìn)行圖像標(biāo)注。SpeedDP這個平臺使用起來十分簡便,在圖像標(biāo)注領(lǐng)域其基本使用方法是:1.首先有一個比較好的預(yù)選模型2.用這個預(yù)選模型做自動標(biāo)注3.后期人工審核修正慧視SmartDP是一個小樣本算法開發(fā)工具。貴州省時省力圖像標(biāo)注YOLO系列算法是目標(biāo)識別領(lǐng)域很重要的技術(shù)之一,因為性能強(qiáng)大、消耗算力較少,一直以來都是實時目標(biāo)...
2025-12-09 -
山西多系統(tǒng)適配圖像標(biāo)注功能
成都慧視光電技術(shù)有限公司開發(fā)的Viztra-HE030圖像處理板,利用國產(chǎn)化高性能芯片RK3588開發(fā)而成,它能夠?qū)崿F(xiàn)6.0TOPS的算力,能夠輕松應(yīng)對糧庫內(nèi)部復(fù)雜的環(huán)境,成都慧視可以根據(jù)客戶使用的相機(jī)接口進(jìn)行圖像處理板的接口深度定制,實現(xiàn)快速的AI害蟲識別。在算法方面,可以使用自己的算法,我司還可以根據(jù)需求定制提供算法性能訓(xùn)練提升工具SpeedDP,平臺可以通過大量的糧庫害蟲AI識別模型訓(xùn)練,提升自身算法精度,進(jìn)而提升攝像頭害蟲識別精度。慧視光電幫您訓(xùn)練算法!山西多系統(tǒng)適配圖像標(biāo)注功能而像標(biāo)注、適配性移植部署等工作會耗費圖像算法工程師大量時間和精力。對于時間成本的把控不到位,就變相增加了項目...
2025-12-09 -
河北圖像標(biāo)注產(chǎn)品
IDEA研究院團(tuán)隊推出了GroundingDINO?1.5,它能夠?qū)崿F(xiàn)端側(cè)實時識別。在圖像和文本的語義理解上表現(xiàn)出色,能夠快速、準(zhǔn)確地根據(jù)語言提示檢測和識別圖像中的目標(biāo)對象。作為當(dāng)前性能比較好的開集檢測模型,GroundingDINO?1.5Pro可以幫助構(gòu)建海量的具有物體級別語義信息的多模態(tài)數(shù)據(jù),從而有效地助力多模態(tài)大模型的訓(xùn)練。它可以將長文本描述中的短語與圖像中的具體對象或場景精確匹配,以增強(qiáng)AI對視覺內(nèi)容和文本之間關(guān)系的理解。目前,成都慧視利用AI圖像處理板和YOLO算法來實現(xiàn)對物體的實時監(jiān)測,其中,開發(fā)的Viztra-HE030圖像處理板采用了瑞芯微全新一代高性能芯片RK3588,擁有...
2025-12-09 -
 山西高效圖像標(biāo)注哪里買
山西高效圖像標(biāo)注哪里買實現(xiàn)這些功能的技術(shù)中,圖像處理基于AI圖像處理板這一傳感器。板卡具備快速圖像處理識別的硬件能力,植入相應(yīng)的AI算法,無人機(jī)就相當(dāng)于裝上了“智慧眼”,而且這個“智慧眼”居于高空,能夠在一個定點,俯瞰大范圍,實時監(jiān)控貨物的存放狀態(tài)。遠(yuǎn)程控制技術(shù)基于網(wǎng)絡(luò)通信,通過和圖像處理板的結(jié)合,能夠?qū)崿F(xiàn)低延時低帶寬的圖像傳輸處理。在實際落地應(yīng)用中,可以采用成都慧視開發(fā)的高性能圖像處理板,其中RV1126系列的Viztra-LE026圖像處理板,就是無人機(jī)的完美搭子。這款圖像處理板具備2.0TOPS的算力,能夠根據(jù)無人機(jī)型號進(jìn)行接口定制,整體尺寸在40mm×40mm×10mm左右(核心板+接口板),小巧的外形即便...
2025-12-09 -
陜西快速圖像標(biāo)注優(yōu)勢
除了高質(zhì)量數(shù)據(jù)集產(chǎn)品外,鳳凰數(shù)據(jù)還將推出以數(shù)據(jù)為中心的一站式AI訓(xùn)練平臺,計劃于近期開放內(nèi)測。平臺將與高質(zhì)量數(shù)據(jù)集市實現(xiàn)互聯(lián)互通,確保數(shù)據(jù)在平臺內(nèi)的安全使用。平臺也將提供一系列以數(shù)據(jù)為中心的服務(wù),包括豐富的數(shù)據(jù)處理工具、可視化模型訓(xùn)練和微調(diào)套件、大量的數(shù)據(jù)和模型評估框架和多云異構(gòu)的算力資源。在內(nèi)地,也有很多企業(yè)開發(fā)了類似平臺,慧視光電推出的AI自動圖像標(biāo)注平臺SpeedDP就是一個以數(shù)據(jù)為中心的一站式AI訓(xùn)練平臺,通過平臺能夠讓AI不斷進(jìn)行學(xué)習(xí),進(jìn)而更加精確的識別圖像。SmartDP是什么平臺呀?陜西快速圖像標(biāo)注優(yōu)勢圖像標(biāo)注就是給圖像打上標(biāo)簽標(biāo)記,例如矩形框等形式,在以前,需要招聘專門的圖像標(biāo)...
2025-12-09 -
寧夏比較好的圖像標(biāo)注哪里買
騰訊開發(fā)的機(jī)器人小五,采用輪、腿、足復(fù)合設(shè)計,使得它具備越障能力的同時,也保持了輪式機(jī)器人的運行效率。每條腿都可以單獨伸長縮短,能有效提升承載能力。裝上了雙編碼器大扭矩密度的執(zhí)行器后,就能承受住一般成年人的重量。將機(jī)器人用于養(yǎng)老服務(wù)領(lǐng)域,能夠幫老人取快遞,抱老人起床,帶老人進(jìn)行活動。機(jī)器人內(nèi)置RGBD相機(jī),在圖像處理板的賦能下,能夠?qū)崟r檢測周邊環(huán)境,進(jìn)行路線規(guī)劃和避障,以高效完成各項工作指令。同時能夠?qū)ξ矬w進(jìn)行AI識別,判斷老人位置、行為動作,為老人的行動做出幫助。如何進(jìn)行快速的數(shù)據(jù)標(biāo)注?寧夏比較好的圖像標(biāo)注哪里買無人機(jī)的迅猛發(fā)展,使得無人機(jī)的反制技術(shù)也水漲船高,常見的有電子干擾、無人機(jī)識別對...
2025-12-08 -
安徽快速圖像標(biāo)注功能
無人機(jī)在農(nóng)業(yè)領(lǐng)域能夠?qū)崿F(xiàn)高效率的施肥、播種等操作。但是不同的作業(yè)環(huán)境對于無人機(jī)的工作性能要求不一樣,同樣的方案在平原地區(qū)適用,在高原地區(qū)就不行。因此針對于特殊作業(yè)環(huán)境需要制定不同的智慧化方案。像青藏高原這樣地貌復(fù)雜、低氣壓、大溫差的特點,參與智能化工作的各個部件需要符合這樣作業(yè)環(huán)境特點的性能要求。不比平原的一馬平川,高原由于環(huán)境復(fù)雜,地形起伏對于無人機(jī)的飛行也需要進(jìn)行控制,無論是高度還是速度甚至距離都需要進(jìn)行嚴(yán)格限制,防止出現(xiàn)撞機(jī)等事故。因此,這個方面的智慧化建設(shè)就需要無人機(jī)具備智能避障的功能,無人機(jī)需要在高速度或者遠(yuǎn)距離的情況下識別樹木、電線桿、石頭等障礙物,并能夠?qū)崿F(xiàn)避障。視頻可用于數(shù)據(jù)集...
2025-12-08 -
廣東信息化圖像標(biāo)注哪里買
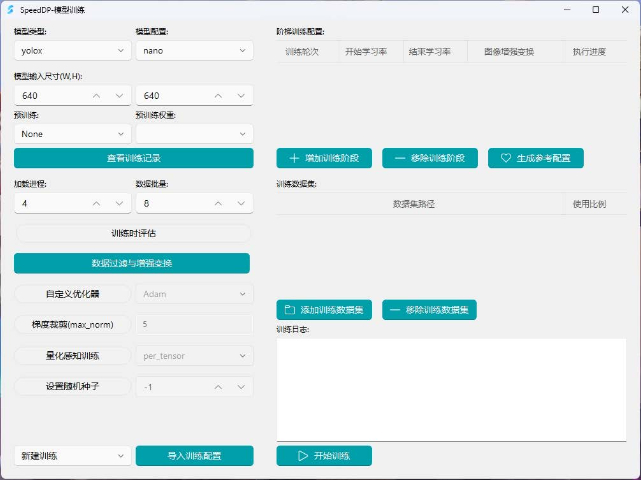
新疆地緣遼闊、日照豐富,因此是我國光伏儲能發(fā)達(dá)的區(qū)域之一。為了保障光伏基地的正常運作,周期性的巡檢必不可少,傳統(tǒng)模式下需要人工一步一個腳印走出來,隨著現(xiàn)在無人機(jī)的廣落地應(yīng)用,這種大面積大范圍的巡檢也迎來了效率的飛躍。光伏基地每隔一段地方就會有一個鐵塔,這些“駐塔式”機(jī)巢就是無人機(jī)的“巢穴”,無人機(jī)從這里起飛,進(jìn)行巡邏,再回到這里進(jìn)行充電,循環(huán)往復(fù)。得益于智慧化的建設(shè),這些巡檢無人機(jī)有自主巡飛、自動巡檢的能力,可完成以機(jī)巢為中心5公里范圍內(nèi)的輸配電線路和變電設(shè)備網(wǎng)格化巡檢任務(wù)。SpeedDP提供豐富的模型結(jié)構(gòu)配置選項,用戶可以根據(jù)需要調(diào)整網(wǎng)絡(luò)深度、寬度和特定模塊。廣東信息化圖像標(biāo)注哪里買成都慧視...
2025-12-08 -
 湖南高效圖像標(biāo)注有哪些
湖南高效圖像標(biāo)注有哪些目前,采用圖像識別技術(shù)來實現(xiàn)無人機(jī)規(guī)避其他障礙物是一個有效的方法。通過在無人機(jī)上植入圖像識別模塊,這個模塊由圖像處理板和相機(jī)組合而成,通過算法的賦能,就能針對不同物體實現(xiàn)快速AI識別,然后實現(xiàn)規(guī)避。而在圖像處理板的選擇上,成都慧視開發(fā)的Viztra-LE026圖像處理板就十分合適。這塊板卡采用了RV1126開發(fā)設(shè)計而成,外形呈圓形,體積小巧,尺寸為Ф38mm*12mm,重量只有12g,用在無人機(jī)上不會過多占用空間。此外,該板卡功耗≤4W,也不會增加無人機(jī)的續(xù)航負(fù)擔(dān)。SmartDP是單模型優(yōu)化架構(gòu)。湖南高效圖像標(biāo)注有哪些無人機(jī)的迅猛發(fā)展,使得無人機(jī)的反制技術(shù)也水漲船高,常見的有電子干擾、無人機(jī)識...
2025-12-08 -
遼寧圖像標(biāo)注產(chǎn)品
圖像識別技術(shù)的高價值應(yīng)用就發(fā)生在你我身邊,例如視頻監(jiān)控、自動駕駛和智能醫(yī)療等,而這些圖像識別進(jìn)展的背后推動力是深度學(xué)習(xí)。深度學(xué)習(xí)的成功主要得益于三個方面:大規(guī)模數(shù)據(jù)集的產(chǎn)生、強(qiáng)有力的模型的發(fā)展以及可用的大量計算資源。對于各種各樣的圖像識別任務(wù),精心設(shè)計的深度神經(jīng)網(wǎng)絡(luò)已經(jīng)遠(yuǎn)遠(yuǎn)超越了以前那些基于人工設(shè)計的圖像特征的方法。盡管到目前為止深度學(xué)習(xí)在圖像識別方面已經(jīng)取得了巨大成功,但在它進(jìn)一步廣泛應(yīng)用之前,仍然有很多挑戰(zhàn)需要我們?nèi)ッ鎸ΑmartDP基于yolo實現(xiàn)算法模型的打造。遼寧圖像標(biāo)注產(chǎn)品2023年,全球科技領(lǐng)域受歡迎的當(dāng)屬AI行業(yè),原以為進(jìn)入2024會沉寂一段時間,不聊Sora文生視頻大模型的...
2025-12-08 -
青海國產(chǎn)化圖像標(biāo)注有哪些
YOLO系列算法是目標(biāo)識別領(lǐng)域很重要的技術(shù)之一,因為性能強(qiáng)大、消耗算力較少,一直以來都是實時目標(biāo)檢測領(lǐng)域的主要范式。該框架被大量用于各種實際應(yīng)用,包括自動駕駛、監(jiān)控和物流等行業(yè)的目標(biāo)識別。自今年2月YOLOv9發(fā)布以后,近期,清華又推出了YOLOv10,作為計算機(jī)視覺領(lǐng)域的突破性框架,具備實時的端到端目標(biāo)檢測能力,通過提供結(jié)合效率和準(zhǔn)確性的強(qiáng)大解決方案,延續(xù)了YOLO系列的傳統(tǒng)。據(jù)悉,YOLOv10在各種模型規(guī)模上都實現(xiàn)了SOTA性能和效率。例如,YOLOv10-S在COCO上的類似AP下比RT-DETR-R18快1.8倍,同時參數(shù)數(shù)量和FLOP大幅減少。與YOLOv9-C相比,在性能相同的情...
2025-12-08 -
云南如何圖像標(biāo)注產(chǎn)品
但這也遇到很多難點,通常情況下,視頻回傳的延遲大概在200ms左右,隨著大量的彈打出,視頻傳輸所需帶寬就面臨壓力,如何在通信帶寬有限的情況下,保證視頻順暢、清晰、無卡頓地傳輸,是分析改進(jìn)這個工作需要解決的前期難點。針對于這個問題,慧視光電利用GS弱網(wǎng)高清音視頻傳輸系統(tǒng)和RK3588打造的Viztra-HE030圖像處理板結(jié)合,推出了低延遲低帶寬圖傳解決方案。在一個窄帶收發(fā)信道內(nèi),例如在信道有效帶寬0.5Mb/s~2Mb/s內(nèi),多路視頻和交互控制共用一對收發(fā)信道,信道支持?jǐn)?shù)據(jù)透傳,外部系統(tǒng)可以使用該信道,傳輸任意格式的數(shù)據(jù);可實時調(diào)整視頻碼率,在低至500K帶寬情況下依然可以回傳清晰流暢的圖像。...
2025-12-08 -
陜西安全圖像標(biāo)注哪里買
這種智慧化的建設(shè)就是采用圖像處理。在無人機(jī)內(nèi)部安裝圖像處理板,這些圖像處理板和相機(jī)、算法的有機(jī)結(jié)合就形成了無人機(jī)的智慧眼,有了這個智慧眼,無人機(jī)就能夠?qū)σ曇胺秶鷥?nèi)的物體進(jìn)行AI識別,從而自動完成避障、巡檢等操作。成都慧視開發(fā)的小型化圖像處理板Viztra-LE026就是專門為無人機(jī)設(shè)計的一款“智慧眼”處理器。這塊板卡采用了RV1126開發(fā)而成,具備2.0TOPS的算力,外形呈圓形化設(shè)計,整體外觀大小為Ф38mm*12mm,重量只有12g,功耗不高于4W,用在無人機(jī)領(lǐng)域具有功耗低、尺寸小的優(yōu)勢,不會過多占用和消耗無人機(jī)的內(nèi)部空間和續(xù)航。SmartDP 針對數(shù)據(jù)稀缺或需要快速部署的場景進(jìn)行了特殊優(yōu)...
2025-12-08 -
浙江安全圖像標(biāo)注產(chǎn)品
即使是十分復(fù)雜的照片也可以使用機(jī)器學(xué)習(xí)進(jìn)行分割,這也可以尋找異常情況。利用圖像分割,計算機(jī)可以把一張圖片分成其邏輯組成部分。例如,其可以根據(jù)車窗、擋風(fēng)玻璃、車輪和轉(zhuǎn)向等特征對汽車進(jìn)行分類。由于圖像分割,其可以區(qū)分幾個邏輯部分。慧視光電自研的AI智能算法,具備不斷訓(xùn)練學(xué)習(xí)的超高能力,搭載在開發(fā)的圖像處理板上,就能實現(xiàn)上述功能。并且慧視光電能夠為使用者提供AI訓(xùn)練的平臺工具,為使用者節(jié)約大量的人力物力成本SpeedDP支持從數(shù)據(jù)準(zhǔn)備、模型訓(xùn)練到部署的完整生命周期管理。浙江安全圖像標(biāo)注產(chǎn)品深度學(xué)習(xí)是機(jī)器學(xué)習(xí)的一個分支,只在近十年內(nèi)才得到廣泛的關(guān)注與發(fā)展。它與機(jī)器學(xué)習(xí)不同的,它模擬我們?nèi)祟愖约喝プR別人...
2025-12-08 -
河北安全圖像標(biāo)注功能
機(jī)器視覺具有定位、識別、測量與檢測四大功能,在工業(yè)領(lǐng)域中,機(jī)器視覺可以快速、準(zhǔn)確地獲取大量信息,并且易于自動處理,因此在質(zhì)量檢測方面有著廣泛應(yīng)用。而AI圖像處理板只是實現(xiàn)這些功能的關(guān)鍵傳感器。目前,國內(nèi)的機(jī)器視覺領(lǐng)域已經(jīng)形成了龐大的產(chǎn)業(yè)鏈,從以鏡頭、工業(yè)相機(jī)、圖像捕捉與處理系統(tǒng)等軟硬件研發(fā)制造組成的上游環(huán)節(jié),到智能化機(jī)器視覺集成組裝為主的中游環(huán)節(jié),都非常成熟。AI的不斷發(fā)展,為機(jī)器視覺不斷拓展應(yīng)用場景,而慧視AI圖像處理板的高性能正好成為該領(lǐng)域的融洽解決方案,相信在不遠(yuǎn)的將來,會有越來越多的行業(yè)知道AI圖像處理板將為他們帶來巨大的便利。SpeedDP和SmartDP有什么不同?河北安全圖像標(biāo)注...
2025-12-08 -
天津哪里有圖像標(biāo)注什么價格
食品安全關(guān)乎人民的身體健康和生命安全,是民生大事。在食品生產(chǎn)與流通的各個環(huán)節(jié)中,食品檢測設(shè)備發(fā)揮著不可或缺的關(guān)鍵作用,為舌尖上的安全保駕護(hù)航。從田間地頭的農(nóng)產(chǎn)品,到生產(chǎn)線上的加工食品,再到超市貨架上的各類商品,食品檢測設(shè)備猶如一位位忠誠的“衛(wèi)士”,嚴(yán)格把關(guān)。在農(nóng)業(yè)生產(chǎn)環(huán)節(jié),農(nóng)藥殘留快速檢測儀能快速、精準(zhǔn)地檢測出果蔬上殘留的農(nóng)藥成分,確保農(nóng)產(chǎn)品符合安全標(biāo)準(zhǔn),讓消費者吃得放心。而在食品加工企業(yè),高精度的微生物檢測設(shè)備可以對食品中的細(xì)菌、霉菌等微生物指標(biāo)進(jìn)行監(jiān)測,有效預(yù)防因微生物超標(biāo)引發(fā)的食品安全問題,保障產(chǎn)品質(zhì)量。SpeedDP是長期授權(quán)嗎?天津哪里有圖像標(biāo)注什么價格部署機(jī)器學(xué)習(xí)模型,也稱為模型部...
2025-12-08 -
 重慶省時省力圖像標(biāo)注
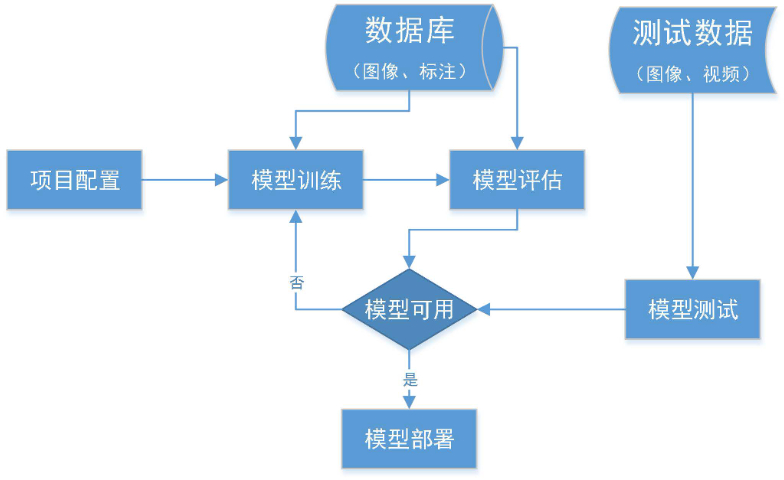
重慶省時省力圖像標(biāo)注隨著AI的快速發(fā)展,對應(yīng)的軟硬件也得到了快速的普及,蘋果公司已經(jīng)推出了新一代的具有AI功能的系列產(chǎn)品,Intel也推出了具有AI能力的新一代芯片。無論是無人機(jī)用吊艙產(chǎn)品還是邊海防用轉(zhuǎn)臺產(chǎn)品,如果前端沒有具有AI能力的圖像處理板卡或智能跟蹤設(shè)備,沒有高性能的AI算法,很難在激烈的競爭中獲得優(yōu)勢。特別是針對一些特定場景或特定目標(biāo)的檢測跟蹤性能提升,圖像算法工程師的壓力與日俱增。按照傳統(tǒng)的做法,需要經(jīng)過數(shù)據(jù)采集、人工標(biāo)注、模型訓(xùn)練、模型部署、效果評估等流程。SmartDP是什么平臺呀?重慶省時省力圖像標(biāo)注2023年,全球科技領(lǐng)域受歡迎的當(dāng)屬AI行業(yè),原以為進(jìn)入2024會沉寂一段時間,不聊Sora文生...
-
浙江信息化圖像標(biāo)注有哪些
無人機(jī)只需要從基地起飛,就能夠?qū)χ付▍^(qū)域進(jìn)行巡檢,智能攝像頭能夠自動問診地面,識別護(hù)欄錯位、路面積水、凹陷、裂縫、交通事故、車流異常等問題,然后標(biāo)記位置。而控制中心能夠?qū)崟r查看前方畫面,接收無人機(jī)回傳的數(shù)據(jù),并進(jìn)行診斷分析,整個過程無需過多的人工干預(yù)。這種無人機(jī)智能問診,是通過向無人機(jī)植入高性能的AI圖像處理板以及定制專門的目標(biāo)識別算法來實現(xiàn)的。成都慧視開發(fā)的Viztra-LE026圖像處理板,就非常適合用在無人機(jī)智能化領(lǐng)域。這塊板卡外形呈圓形設(shè)計,尺寸為ф38*12mm,功率不超過4W,整體呈現(xiàn)功耗低、尺寸小的特點。用在緊湊型的無人機(jī)當(dāng)中也不會因為空間問題而苦惱,并且不會過多消耗無人機(jī)的續(xù)航...
2025-12-07