-
 黔西南北斗5G防碰撞預警廠家
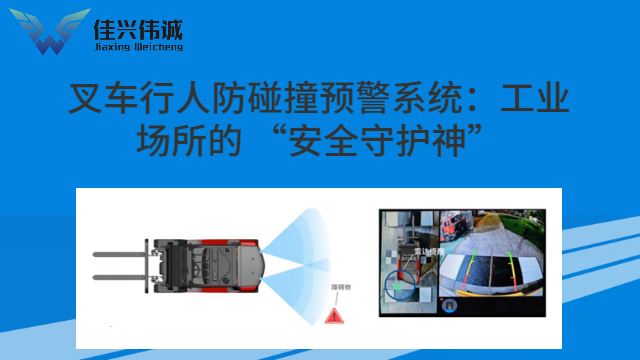
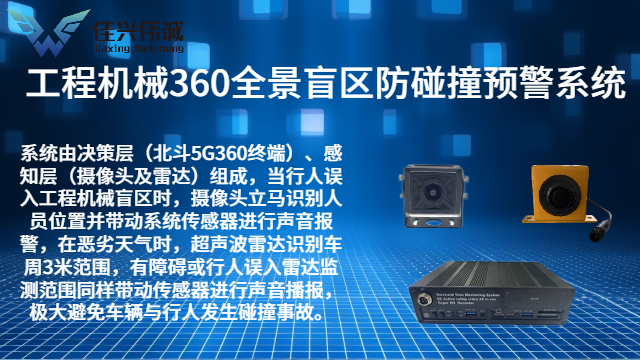
黔西南北斗5G防碰撞預警廠家工程車在建筑施工、港口運輸等場景中發揮著重要作用,但因其體型龐大、車身結構復雜,存在大量視覺盲區,極易引發事故。佳興偉誠工程車盲區防碰撞預警系統,有效解決了這一難題。系統在工程車車身的車頭兩側、車身側面、車尾、后視鏡下方等關鍵位置,部署了高清攝像頭和毫米波雷達等傳感器,實現 360° 無死角的盲區監測。搭載的 AI 算法能夠智能識別盲區內的行人、非機動車和其他工程設備,并對其運動軌跡進行動態追蹤。一旦目標進入預警區域,系統立即通過視覺、聽覺、觸覺三重提醒方式,向駕駛員傳遞風險信息,從根源上減少盲區導致的碾壓、碰撞事故,保障作業人員及周邊人群的生命安全。?工程車盲區 BSD 防碰撞預警系統是保障...
-
 北京防碰撞預警找哪家
北京防碰撞預警找哪家工程車輛 360 全景盲區防碰撞預警系統在保障車輛安全行駛方面發揮著關鍵作用,其在多個方面展現出獨特的優勢。首先,在安全性能提升方面,該系統效果明顯。據統計,車輛事故中有相當高比例是由于盲區問題導致的,而該系統的應用可大幅降低此類事故率。以工程車輛為例,在安裝了 360 全景盲區防碰撞預警系統后,因盲區引發的事故率可降低 60% - 80%。這是因為系統通過無死角的監測,讓駕駛員能夠及時發現原本處于盲區的危險目標,提前采取制動或避讓措施,從而有效避免碰撞事故的發生,極大地保障了駕駛員、乘客以及周圍行人的生命安全。其次,該系統有助于提高車輛的操作便利性。在一些復雜的作業場景中,如建筑施工場地,駕...
-
 西安北斗5G防碰撞預警定制設計
西安北斗5G防碰撞預警定制設計港口集裝箱卡車作業環境繁忙,堆場里集裝箱林立,往來車輛眾多,碰撞事故頻發。佳興偉誠為港口集裝箱卡車打造的防碰撞預警系統,是應對這種環境的利器。系統在卡車前后及兩側安裝廣角雷達,能穿透集裝箱之間的縫隙,探測到隱藏的車輛和人員。當卡車靠近堆垛的集裝箱時,系統會提前預警 “注意右側集裝箱”;當與其他作業車輛交會距離過近,會即時播報 “左側有卡車靠近,減速避讓”。系統還能識別集裝箱的位置和高度,在吊裝集裝箱時,輔助司機判斷與吊具的距離,避免碰撞損壞貨物。該系統適應港口的高溫、高濕環境,穩定性強,為港口裝卸效率和安全提供雙重保障。大型車輛盲區防碰撞預警系統通過攝像頭與雷達融合技術,感知路況,為車輛行駛安...
-
延邊工程車前向防碰撞預警
工程車在建筑施工、港口運輸等場景中發揮著重要作用,但因其體型龐大、車身結構復雜,存在大量視覺盲區,極易引發事故。佳興偉誠工程車盲區防碰撞預警系統,有效解決了這一難題。系統在工程車車身的車頭兩側、車身側面、車尾、后視鏡下方等關鍵位置,部署了高清攝像頭和毫米波雷達等傳感器,實現 360° 無死角的盲區監測。搭載的 AI 算法能夠智能識別盲區內的行人、非機動車和其他工程設備,并對其運動軌跡進行動態追蹤。一旦目標進入預警區域,系統立即通過視覺、聽覺、觸覺三重提醒方式,向駕駛員傳遞風險信息,從根源上減少盲區導致的碾壓、碰撞事故,保障作業人員及周邊人群的生命安全。?深圳市佳興偉誠科技是生產工程車、商用車等...
-
 拉薩工程車防碰撞預警定制
拉薩工程車防碰撞預警定制我國煤礦業如今發展迅速,行業發展的同時帶來的問題也很多,如大多露天煤礦環境惡劣,風沙大,可見度低,礦車在作業時看不到與前車的車距,很容易造成車輛追尾事故。佳興偉誠科技針對此現象研發出礦山車輛前向防碰撞預警系統,該系統分別由:前向毫米波雷達傳感器;報警器;顯示器組成,通過安裝在車頭前方的前向毫米波雷達傳感器來識別前車與本車的距離,并在顯示器上顯示出與前車的距離,當距離過近時,報警器發出警報以此來提醒司機,避免造成危險事故發生。商用車BSD盲區防碰撞預警系統融合多傳感器數據,準確識別行人,分級預警,為駕駛員提供清晰避險指引。拉薩工程車防碰撞預警定制隨著我國經濟迅速發展的同時,工程車行業也隨之帶動起...
-
 克拉瑪依汽車防撞防碰撞預警價格
克拉瑪依汽車防撞防碰撞預警價格佳興偉誠為小型貨運三輪車開發的 360 全景盲區防碰撞預警系統,在車頭、車尾及兩側貨箱安裝 4 個攝像頭,數據實時傳輸至車把中間的小型顯示屏。當三輪車穿梭在集市小巷,全景畫面可清晰呈現周圍攤位、行人,若與兩側物體距離小于 40 厘米,系統自帶的蜂鳴器會發出 “注意側方碰撞” 的提示音,同時顯示屏對應區域閃爍紅光。該系統所有組件供電,過攝像頭、顯示屏與蜂鳴器聯動,不涉及三輪車的動力系統,讓商販在密集人流中送貨更穩妥。從長遠來看,隨著大數據與人工智能技術的不斷融合,該系統將朝著更智能化、個性化的方向發展,能夠根據不同路況、天氣以及駕駛員習慣進行自適應調整,實現更精確高效的防護。佳興偉誠挖掘機作業區...
-
 漢中工程車防碰撞預警定制
漢中工程車防碰撞預警定制預警方式豐富多樣且直觀有效。駕駛室內的車載顯示屏會用醒目的顏色和圖標標注出危險目標的位置,并顯示其與車輛的實時距離。同時,蜂鳴器會發出急促的警報聲,隨著危險程度的增加,警報聲的頻率也會加快,以引起駕駛員的高度注意。對于一些大型工程車輛,還配備了外部聲光報警裝置,不提醒駕駛員,也能讓車輛周圍的人員及時察覺到危險,從而采取相應的避讓措施。該系統在多種車輛類型和應用場景中都發揮著重要作用。對于公交客運車、校車等公共交通工具而言,其龐大的車身導致存在較多盲區,該系統能夠有效消除這些盲區帶來的安全隱患,保障乘客和行人的安全。在建筑工地上,挖掘機、裝載機等工程車輛在作業時,周圍環境復雜,人員流動頻繁,36...
-
 銅川特種車盲區防碰撞預警哪家好
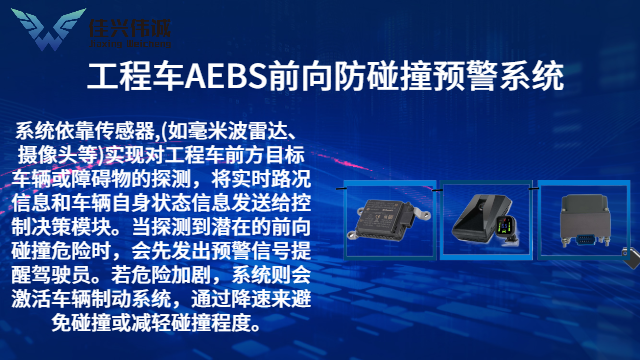
銅川特種車盲區防碰撞預警哪家好車輛在行駛過程中,安裝于車前方的測距雷達不斷檢測本車與前方障礙物的安全距離,當存在碰撞危險時,系統首先通過聲、光進行報警,若駕駛員未及時采取有效措施,系統自動啟動緊急制動,使車輛減速以實現防撞功能。能有效降低因突發情況、疏忽、疲勞駕駛、注意力不集中、駕駛員經驗少、誤把油門當剎車等情況導致的追尾事故。當裝有佳興偉誠商用車AEBS防碰撞預警系統的車輛正常行駛時,前方車輛減速,即將發生碰撞時,駕駛員未采取任何規避措施,AEBS系統根據目標車輛的相對距離和相對車速,自行判定預警、減速、制動等動作,極大程度上避免或減輕碰撞事故。礦車前向防碰撞預警系統通常由感知層、數據處理層、預警層三部分組成。銅川特種車...
-
天津大型車輛盲區防碰撞預警
隨著交通環境的日益復雜,車輛 360 全景盲區防碰撞預警系統的重要性愈發凸顯。它為各類車輛提供了無死角的安全防護,在多個關鍵領域發揮著不可替代的作用。從系統構成來看,感知層是其基礎。以高清攝像頭為例,在車輛周身合理布局多個高清攝像頭,它們猶如車輛的 “眼睛”,敏銳地捕捉周圍環境信息。這些攝像頭的超廣角設計,確保了對車身周圍大面積盲區的有效覆蓋。無論是在白天的強光下,還是夜晚的黑暗環境中,都能清晰成像。搭配的毫米波雷達或超聲波雷達,更是為系統在惡劣天氣條件下的正常運行提供了保障。在雨霧彌漫時,雷達能夠憑借其獨特的測距原理,精確感知障礙物的位置,與攝像頭數據相互補充,實現更無死角、準確的環境感知。...
-
 株洲主動安全防碰撞預警
株洲主動安全防碰撞預警工程機械車輛作業時,存在諸多安全隱患。其作業半徑內駕駛員視覺盲區大,且作業環境中車輛噪音大、尾氣污染嚴重,易導致駕駛員疲勞駕駛、注意力分散、判斷力降低,還可能出現視線遮擋、超速作業回轉等危險駕駛行為,嚴重威脅作業安全。?隨著影像識別和人工智能技術的發展,機器視覺識別能力不斷提升。佳興偉誠 IA 智能影像防撞預警系統應運而生,專為工程車輛設計,可實時偵測工作區域危險狀態并警示,提升作業安全。該系統通過在車輛護頂架四周安裝四顆 210 度 AI 識別攝像頭,借助超高清畫質和深度學習算法實現機器視覺識別,畫面實時顯示在屏幕上,方便司機查看。當有障礙物或人員進入危險區域,司機能通過屏幕收到動態防撞預警...
-
雙鴨山路橋工程車防碰撞預警哪家好
車輛在行駛過程中,安裝于車前方的測距雷達不斷檢測本車與前方障礙物的安全距離,當存在碰撞危險時,系統首先通過聲、光進行報警,若駕駛員未及時采取有效措施,系統自動啟動緊急制動,使車輛減速以實現防撞功能。能有效降低因突發情況、疏忽、疲勞駕駛、注意力不集中、駕駛員經驗少、誤把油門當剎車等情況導致的追尾事故。當裝有佳興偉誠商用車AEBS防碰撞預警系統的車輛正常行駛時,前方車輛減速,即將發生碰撞時,駕駛員未采取任何規避措施,AEBS系統根據目標車輛的相對距離和相對車速,自行判定預警、減速、制動等動作,極大程度上避免或減輕碰撞事故。搭載毫米波雷達的工程車防碰撞預警系統,能快速掃描周圍障礙物,及時發出警報,避...
-
昌吉工程車防碰撞預警哪家好
佳興偉誠 360 全景防碰撞預警系統,匯聚前沿科技,為工程車安全作業筑牢根基,其技術水平在行業內處于地位。?其搭載的 AI 智能識別算法,經百萬級工程場景數據訓練,可精確分辨 10 余種目標物體,包括行人、電動車、挖掘機、墻體等,對行人的識別準確率高達 98%,哪怕在光線昏暗的隧道作業,依靠微弱的環境光,也能精確鎖定目標。配合每秒 20 次的高頻率毫米波雷達,實時探測 0.5 - 10 米內物體的距離與速度,數據誤差控制在 3 厘米以內。當危險臨近,系統立即發出分級預警:一級預警以 50 分貝的輕聲提示,二級預警則通過 75 分貝的急促蜂鳴與屏幕高頻閃爍,強制吸引駕駛員注意,為安全操作爭取寶貴...
-
 包頭商用車前向防碰撞預警方案
包頭商用車前向防碰撞預警方案工程車作為基建施工、搶險救援的 “主力軍”,其作業環境往往伴隨著狹窄通道、密集人流、重型設備交錯等特點,而車輛自身的高大車身與復雜結構(如起重機的吊臂、挖掘機的鏟斗),進一步擴大了駕駛員的視覺盲區,成為安全作業的 “心腹大患”。工程車盲區防碰撞預警系統通過融合物聯網、人工智能與機器視覺技術,為特種工程車量身打造 “動態安全結界”,重定義作業安全標準。系統采用 “多傳感器融合” 方案:除車身四周的 4 顆 210 度超廣角 AI 攝像頭外,還集成了毫米波雷達與超聲波傳感器。攝像頭負責捕捉高清畫面并識別目標類型(行人、車輛、固定障礙物),雷達則精確測算目標與車輛的實時距離及相對速度,兩者數據交叉驗...
-
 昌吉北斗5G防碰撞預警哪家好
昌吉北斗5G防碰撞預警哪家好佳興偉誠科技推出的卡車 360 度全景智能防碰撞系統,憑借車身周圍前后左右 4 個超廣角、高清夜視攝像頭,實時捕捉四周高清視頻畫面,再經圖像處理器運用 360 算法完成畸變矯正、變換、圖像拼接與融合等一系列精細處理,終生成車身周圍 360° 的鳥瞰全景畫面并呈現在車載顯示屏上,為司機帶來無死角的駕駛輔助,讓車輛周邊狀況一目了然。在復雜交通環境中,面對行人突然橫穿、前車緊急剎車、相鄰車道車輛并線等突發情況,該系統能迅速作出反應,通過聲音、視覺乃至震動等多種方式及時提醒駕駛員采取規避動作。更值得一提的是,部分系統具備的自動緊急制動功能,在駕駛員反應不及時或判斷出現失誤時,可自主介入實現減速甚至剎停...
-
漢中工程車防碰撞預警找哪家
北斗5G渣土車360°全景AI環視盲區防碰撞預警系統,給渣土車帶上“電子眼”,讓監管“看得見、管的住、可追溯”,減少生產安全事故發生,該產品為360°環視AI預警系統,可提供全天候無盲區的車周實時畫面顯示,結合物體識別算法,為用戶提供更安全的行車環境。產品通過四路高清攝像頭實時捕捉車周影像,對影像進行畸變矯正處理及畫面無縫拼接,形成一副完整的車輛周邊環境鳥瞰圖,并結合的3D 圖像引擎,減少用戶視角盲區。給渣土車帶上“緊箍咒”,”武裝到牙齒“不讓駕駛人員可以更好的消除盲區,還提醒靠近車輛、行人注意保持車距。同時智能的ADAS 物體識別算法,實時處理車道線及車周物體,為用戶提前判別周圍危險區域,減...
-
天津路橋工程車防碰撞預警找哪家
工程車在建筑施工、港口運輸等場景中發揮著重要作用,但因其體型龐大、車身結構復雜,存在大量視覺盲區,極易引發事故。佳興偉誠工程車盲區防碰撞預警系統,有效解決了這一難題。系統在工程車車身的車頭兩側、車身側面、車尾、后視鏡下方等關鍵位置,部署了高清攝像頭和毫米波雷達等傳感器,實現 360° 無死角的盲區監測。搭載的 AI 算法能夠智能識別盲區內的行人、非機動車和其他工程設備,并對其運動軌跡進行動態追蹤。一旦目標進入預警區域,系統立即通過視覺、聽覺、觸覺三重提醒方式,向駕駛員傳遞風險信息,從根源上減少盲區導致的碾壓、碰撞事故,保障作業人員及周邊人群的生命安全。?大型車輛BSD盲區防碰撞預警系統,實時監...
-
榆林商用車盲區防碰撞預警哪家好
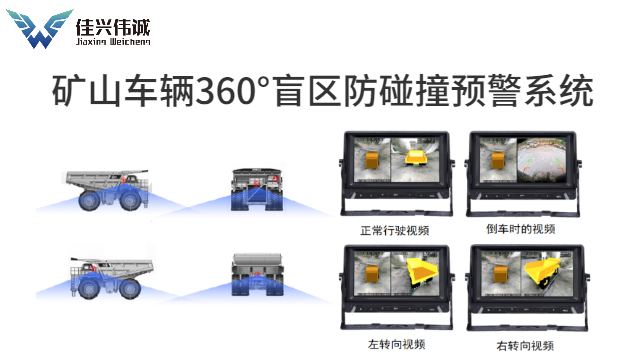
車輛 360 全景盲區防碰撞預警系統在不同類型車輛中的應用,有效解決了各類車輛在行駛和作業過程中的盲區安全問題。對于大型工程車輛,如挖掘機、裝載機、起重機、渣土車等,其作業環境復雜,車身龐大,盲區范圍廣。在建筑施工場地,挖掘機在回轉作業時,后方和兩側的盲區容易隱藏施工人員,一旦發生碰撞,后果不堪設想。360 全景盲區防碰撞預警系統通過在車輛四周安裝多個高清攝像頭,將采集到的圖像進行實時拼接,為駕駛員提供 360° 全景視圖,清晰顯示車輛周圍的人員和障礙物情況。當檢測到有人員或物體進入危險區域時,系統會立即發出聲光報警,提醒駕駛員注意,從而避免碰撞事故的發生。在起重機吊裝作業中,該系統能夠監測吊...
-
包頭石油工程車防碰撞預警
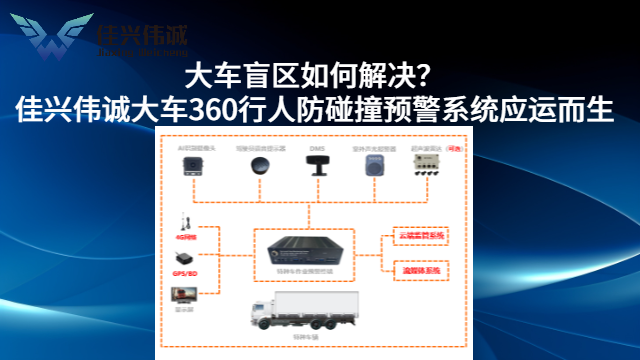
佳興偉誠 360 度全景防碰撞預警系統(又稱車輛環視系統),工作原理是通過車輛前后左右的四枚超廣角鏡頭采集實時影像,經圖像處理單元處理后,在中控屏幕形成實時完整的 360 度全景俯視鳥瞰圖。4 個攝像頭還帶算法,可監測四周行人及車輛,當有靠近時會報警并在中控屏圈出其位置,能大幅減少車輛周邊盲區。該系統集成了北斗定位、5G/4G 視頻傳輸、CAN 通訊,以及 BSD(盲區監測預警)、DSM(疲勞駕駛 + 行為檢測)、ADSA(車道偏離)、聲光警報等傳感器,通過自有算法結合影像(被動安全)與傳感器(主動安全),實現特種車 360 度無死角主動行車安全輔助。其中,ADAS 實時監控車輛與車道相對位置...
-
牡丹江大型車輛盲區防碰撞預警價格
工程車輛盲區視覺 360 防碰撞預警系統是專為挖掘機、裝載機等大型工程車輛設計的安全輔助系統,通過多維度視覺感知與智能算法,實時監測車輛周圍盲區的人員、障礙物等潛在危險,以聲光報警、圖像顯示等方式提醒駕駛員,減少碰撞事故。?系統由感知層、處理層和預警層構成。感知層含 4-6 個超廣角高清攝像頭,覆蓋 3-10 米盲區,支持夜視和 IP6K9K 級防水防塵,還可搭配雷達應對惡劣天氣;處理層運用圖像拼接、目標檢測與追蹤算法及危險等級評估技術;預警層通過車載顯示屏和內外聲光裝置實現預警。?其關鍵技術優勢在于盲區覆蓋率超 90%,AI 算法能精確識別目標減少誤報,且響應延遲<200ms。典型應用場景包...
-
寧夏工程車輛行人防碰撞預警方案
北斗5G渣土車360°全景AI環視盲區防碰撞預警系統,給渣土車帶上“電子眼”,讓監管“看得見、管的住、可追溯”,減少生產安全事故發生,該產品為360°環視AI預警系統,可提供全天候無盲區的車周實時畫面顯示,結合物體識別算法,為用戶提供更安全的行車環境。產品通過四路高清攝像頭實時捕捉車周影像,對影像進行畸變矯正處理及畫面無縫拼接,形成一副完整的車輛周邊環境鳥瞰圖,并結合的3D 圖像引擎,減少用戶視角盲區。給渣土車帶上“緊箍咒”,”武裝到牙齒“不讓駕駛人員可以更好的消除盲區,還提醒靠近車輛、行人注意保持車距。同時智能的ADAS 物體識別算法,實時處理車道線及車周物體,為用戶提前判別周圍危險區域,減...
-
延邊礦車盲區防碰撞預警定制設計
大型車輛因體型龐大、車身結構復雜,存在的側方、后方及車頭下方盲區,在公路行駛、廠區作業或港口轉運等場景中,易與行人、小型車輛、作業設備發生碰撞事故。大型車輛盲區防碰撞預警系統應運而生,該系統由分布在車身四周的毫米波雷達、高清攝像頭、超聲波傳感器,駕駛室內的多功能顯示屏及聲光報警裝置組成,可無死角實時監測盲區中的移動物體和固定障礙物。系統具備精確識別、動態追蹤與多級預警功能,能將盲區目標的距離、速度、類型等信息在顯示屏上清晰呈現并同步更;當目標處于安全預警范圍時,觸發一級預警,對應盲區方向的車身警示燈亮起黃色燈光,同時語音播報 “盲區有物體,請注意”;若目標進入危險范圍,立即啟動二級預警,警示燈...
-
武漢消防車防碰撞預警多少錢
商用車因車身寬大、駕駛室位置高,存在較大的側方、后方盲區,在城市道路行駛或場站停靠時,易與非機動車、行人及小型車輛發生碰撞事故。商用車盲區防碰撞預警系統專為解決這一問題設計,由安裝在車身兩側后視鏡下方、尾部的毫米波雷達,車門立柱上的警示燈,駕駛室內的顯示屏及語音報警器組成,可實時監測盲區范圍內的移動物體。系統具備動態監測與分級預警功能,能將盲區目標的距離、運動軌跡等信息在顯示屏上直觀呈現;當目標處于較遠的預警區域時,觸發一級預警,對應側的車門立柱警示燈亮起黃色燈光,同時語音播報 “注意側方盲區”;若目標進入危險范圍,立即啟動二級預警,警示燈變為紅色并持續閃爍。車輛防碰撞預警系統不受天氣(如雨、...
-
黑河裝載車盲區防碰撞預警
在礦山上,礦車作業環境惡劣,前車行駛過程中帶起的灰塵很容易使后車視野受到遮擋,從而發生車輛碰撞等危險事故,佳興偉誠車輛前向道路防碰撞預警輔助系統可以很好的解決這一痛點,從而大幅度的提升礦車作業安全系數。佳興偉誠車輛前向道路防碰撞輔助系統由車距顯示器、毫米波雷達、聲光報警器組成,通過安裝在車頭下方中間的毫米波雷達來測量與前車的距離,當與前車車距過近時,聲光報警器會進行語音提醒駕駛員,并在駕駛室內部安裝的顯示器上看到與前車的距離,從而避免危險事故的發生。工程車防碰撞預警系統通過實時顯示車輛與障礙物的距離,讓司機直觀了解當前安全狀況。黑河裝載車盲區防碰撞預警環衛車在城市道路上作業,清掃、清運時常常需...
-
喀什工程車前向防碰撞預警哪家好
工程車的 “視線死角” 成因復雜,或因車身結構遮擋,如混凝土攪拌車的旋轉筒擋住右側 3-5 米范圍;或因作業環境復雜,像礦山工地的粉塵會讓能見度降至 5 米以下。佳興偉誠盲區防碰撞預警系統憑借先進技術,成為解決難題的關鍵。?其搭載的激光雷達掃描頻率達 10Hz,可精確測量 0.3-10 米內障礙物距離,誤差不超過 5 厘米;配合紅外攝像頭,在夜間無光環境中也能清晰成像,識別行人準確率達 95%。數據經車載芯片 0.1 秒快速處理后,以彩色標注的方式在顯示屏呈現,讓原本的 “盲區” 變得透明可見,技術實力為安全保駕護航。在礦山作業中,佳興偉誠科技的工程車防碰撞預警系統有效減少了車輛間的碰撞事故,...
-
哈密主動安全防碰撞預警設計
預警方式豐富多樣且直觀有效。駕駛室內的車載顯示屏會用醒目的顏色和圖標標注出危險目標的位置,并顯示其與車輛的實時距離。同時,蜂鳴器會發出急促的警報聲,隨著危險程度的增加,警報聲的頻率也會加快,以引起駕駛員的高度注意。對于一些大型工程車輛,還配備了外部聲光報警裝置,不提醒駕駛員,也能讓車輛周圍的人員及時察覺到危險,從而采取相應的避讓措施。該系統在多種車輛類型和應用場景中都發揮著重要作用。對于公交客運車、校車等公共交通工具而言,其龐大的車身導致存在較多盲區,該系統能夠有效消除這些盲區帶來的安全隱患,保障乘客和行人的安全。在建筑工地上,挖掘機、裝載機等工程車輛在作業時,周圍環境復雜,人員流動頻繁,36...
-
甘南工程車輛行人防碰撞預警定制
車輛 360 全景盲區防碰撞預警系統作為車輛安全領域的重要創,以其無死角而強大的功能,為駕駛員提供了可靠的安全支持。在系統功能方面,它實現了對車輛周圍環境的 360° 無死角監測。通過多個高清攝像頭從不同角度采集圖像,再利用先進的圖像拼接技術,將這些圖像無縫融合成一個完整的全景畫面,呈現在駕駛員面前。無論是車輛前方、后方,還是兩側的盲區,都能清晰可見,讓駕駛員對車輛周圍的情況了如指掌。目標檢測與識別功能更是該系統的一大亮點。借助深度學習算法,系統能夠快速準確地識別出車輛、行人、障礙物等不同目標。在復雜的交通場景中,如城市街道上行人、非機動車與機動車混行的情況,系統能夠精確地區分不同目標,并實時...
-
齊齊哈爾路橋工程車防碰撞預警定制設計
由于工程車屬于大型車輛,具有車身長,駕駛位置高,軸距大等特點,車身周圍存在大片視覺盲區。工程車在作業過程中,單憑駕駛員視覺操作,那這些由車身引起的盲區就極大發生危險事故,在調查過程中顯示,很多事故造成大多是因為,周邊車輛人員不知不覺走進工程車盲區范圍內駕駛員看不到而引發,為此佳興偉誠科技研發出工程車四路BSD盲區防碰撞預警系統。工程車四路BSD盲區防碰撞預警系統,通過在工程車車身周圍各加裝一個BSD盲區偵測攝像頭來監測車身周圍的環境,經過算法處理終在司機駕駛室內中控屏上呈現出一個四分割畫面,司機可以清楚地看到工程車車身周邊情況,完美的解決因工程車盲區問題。當工程車在作業時,車身周邊作業范圍闖入...
-
赤峰工程車前向防碰撞預警怎么樣
公交車輛作為城市公共交通的重要組成部分,每天運載大量乘客,其運行安全直接影響著公眾的出行安全。佳興偉誠公交車輛360°全景防碰撞預警系統,致力于為公交出行保駕護航。系統能夠實時監測公交車輛前方、側方以及后方的交通狀況,對前方車輛急剎、行人突然橫穿馬路、側方車輛強行并線等情況進行精確識別和預警。當預警發生時,系統通過車內語音提示、儀表盤警示燈等方式提醒駕駛員采取措施,同時還能將預警信息反饋到公交調度中心,便于調度人員及時掌握車輛運行情況,做出合理調度安排,無死角提升公交運營的安全性和可靠性,讓市民的公交出行更加安心。?工程車防碰撞預警系統借助5G通信技術,實現了實時的數據傳輸,讓預警信息能夠實時...
-
通遼工程車輛行人防碰撞預警哪家好
回顧過往,多起工程車因盲區引發的事故令人痛心。2024 年,某工地一輛渣土車倒車時,因右側盲區有工人蹲身作業未被察覺,車輛剛起步就造成悲劇,不工人家庭承受巨大痛苦,企業也面臨巨額賠償和工期延誤。若當時配備佳興偉誠 360 全景防碰撞預警系統,結果或許截然不同。?系統能 360° 無死角監測車輛周邊,當工人踏入危險區域,0.8 秒內就能發出聲光雙重預警,同時在顯示屏上以動態箭頭精確標注位置,哪怕駕駛員注意力稍有分散,也能被及時提醒,從而及時停車,避免事故。真實案例凸顯系統在保障人員安全、降低事故損失方面的關鍵作用,成為工程車不可或缺的安全配置 。具備DSM的工程車防碰撞預警系統,通過分析司機的眼...
-
呼倫貝爾石油工程車防碰撞預警多少錢
工程機械車輛作業時,存在諸多安全隱患。其作業半徑內駕駛員視覺盲區大,且作業環境中車輛噪音大、尾氣污染嚴重,易導致駕駛員疲勞駕駛、注意力分散、判斷力降低,還可能出現視線遮擋、超速作業回轉等危險駕駛行為,嚴重威脅作業安全。?隨著影像識別和人工智能技術的發展,機器視覺識別能力不斷提升。佳興偉誠 IA 智能影像防撞預警系統應運而生,專為工程車輛設計,可實時偵測工作區域危險狀態并警示,提升作業安全。該系統通過在車輛護頂架四周安裝四顆 210 度 AI 識別攝像頭,借助超高清畫質和深度學習算法實現機器視覺識別,畫面實時顯示在屏幕上,方便司機查看。當有障礙物或人員進入危險區域,司機能通過屏幕收到動態防撞預警...