-
 黔南州工程車前向防碰撞預警定制
黔南州工程車前向防碰撞預警定制由于工程車屬于大型車輛,具有車身長,駕駛位置高,軸距大等特點,車身周圍存在大片視覺盲區。工程車在作業過程中,單憑駕駛員視覺操作,那這些由車身引起的盲區就極大發生危險事故,在調查過程中顯示,很多事故造成大多是因為,周邊車輛人員不知不覺走進工程車盲區范圍內駕駛員看不到而引發,為此佳興偉誠科技研發出工程車四路BSD盲區防碰撞預警系統。工程車四路BSD盲區防碰撞預警系統,通過在工程車車身周圍各加裝一個BSD盲區偵測攝像頭來監測車身周圍的環境,經過算法處理在司機駕駛室內中控屏上呈現出一個四分割畫面,司機可以清楚地看到工程車車身周邊情況,完美的解決因工程車盲區問題。當工程車在作業時,車身周邊作業范圍闖入車...
-
齊齊哈爾主動安全防碰撞預警廠家
佳興偉誠的防碰撞預警系統具備豐富且實用的功能。前向碰撞預警功能在當前車道一定范圍內,時刻判斷本車與前車之間的距離和相對速度,一旦存在潛在碰撞危險,便立即對駕駛者進行警告提醒,讓駕駛員能及時采取制動或避讓措施。車道偏離預警功能則時刻關注車輛行駛軌跡,當駕駛員因疏忽而偏離車道時,系統迅速采用燈光和聲音的方式發出報警,提醒駕駛員及時糾正方向,避免因偏離車道引發碰撞事故。佳興偉誠預警系統,防前撞、糾偏離,預警及時保安全。大型車輛防碰撞預警系統采用高清攝像頭,能清晰捕捉車輛周圍圖像,為司機提供更直觀的視覺預警。齊齊哈爾主動安全防碰撞預警廠家礦山作業環境惡劣,道路崎嶇不平,車輛往來頻繁,粉塵彌漫導致視線受...
-
 內蒙古礦卡前向防碰撞預警廠家
內蒙古礦卡前向防碰撞預警廠家車輛360全景盲區防碰撞預警系統智能目標識別也是其優勢。通過 AI 算法,系統能夠準確區分 “行人”“固定障礙物”“移動車輛” 等不同目標,減少了誤報情況。例如,在復雜的施工場地中,它能夠判斷哪些是真正具有危險的移動物體,而排除樹木、土堆等非危險目標,避免駕駛員因頻繁誤報而產生困擾,從而更專注于應對實際的危險情況。實時性強是該系統的又一特點。從圖像采集到預警響應的延遲時間小于 200ms,這對于工程車輛在低速作業(0 - 30km/h)時的實時監控需求來說,至關重要。在挖掘機回轉、裝載機卸料等瞬間,系統能夠迅速捕捉到周圍環境的變化,并及時發出預警,為駕駛員爭取寶貴的反應時間,有效避免碰撞事故的...
-
 拉薩特種車盲區防碰撞預警方案
拉薩特種車盲區防碰撞預警方案工程車輛作業環境復雜,車身龐大導致盲區眾多,極易因無法察覺周邊人員或物體而引發碰撞事故。針對這一問題,相關科技企業研發出工程車輛盲區防碰撞預警系統,該系統由多組超聲波傳感器、毫米波雷達、高清攝像頭及駕駛室內的聲光報警顯示屏組成,可監測車輛四周盲區范圍內的行人、車輛及障礙物。系統具備實時監測、分級預警功能,能通過傳感器和攝像頭捕捉盲區信息,經處理后在顯示屏上標注目標位置與距離,當目標進入預警范圍時,根據距離遠近觸發不同級別預警:一級預警(較遠距離)時,顯示屏對應區域亮起黃色提示燈,同時發出 “請注意盲區” 的語音提醒;二級預警(較近距離)時,紅色提示燈急促閃爍,語音變為 “盲區有危險,請注意避讓...
-
 甘南礦卡前向防碰撞預警哪家好
甘南礦卡前向防碰撞預警哪家好渣土車因體型高大、作業場景多為城市道路或工地,盲區范圍廣,且周邊行人、非機動車密集,極易因盲區隱患引發碰撞事故。為此,專門研發的渣土車盲區防碰撞預警系統,由分布在車身四周的毫米波雷達、高清攝像頭、超聲波傳感器及駕駛室內的智能顯示屏與聲光報警器構成,可監測車輛前后左右盲區中的行人、電動車、小型車輛及固定障礙物。系統具備動態監測與多級預警功能,能實時將盲區目標的位置、移動方向和距離等信息傳輸至顯示屏并可視化呈現;當目標處于較遠的預警區域時,觸發一級預警,顯示屏對應盲區位置亮起黃色指示燈,同時發出 “盲區有物體,請注意觀察” 的語音提示;若目標逼近至危險范圍,立即啟動二級預警,紅色指示燈高頻閃爍,語...
-
 喀什礦卡前向防碰撞預警系統
喀什礦卡前向防碰撞預警系統工程車輛 360 全景盲區防碰撞預警系統在保障車輛安全行駛方面發揮著關鍵作用,其在多個方面展現出獨特的優勢。首先,在安全性能提升方面,該系統效果明顯。據統計,車輛事故中有相當高比例是由于盲區問題導致的,而該系統的應用可大幅降低此類事故率。以工程車輛為例,在安裝了 360 全景盲區防碰撞預警系統后,因盲區引發的事故率可降低 60% - 80%。這是因為系統通過監測,讓駕駛員能夠及時發現原本處于盲區的危險目標,提前采取制動或避讓措施,從而有效避免碰撞事故的發生,極大地保障了駕駛員、乘客以及周圍行人的生命安全。其次,該系統有助于提高車輛的操作便利性。在一些復雜的作業場景中,如建筑施工場地,駕駛員需要...
-
烏海礦車盲區防碰撞預警定制設計
工程車輛 360 全景實時盲區防碰撞預警系統功能豐富,可直接與倒車雷達連接,也適用于自動化機械設備、配電箱等。其外觀小巧,報警音量達 105dB,有旋轉、閃爍等 4 種燈光模式,工作方式包括通電觸發報警、信號觸發、RS485 通訊控制。?該系統能在車輛啟動、左右轉彎、倒車及右側盲區等場景進行對應語音播報,還支持客戶定制語音和不同語種播報。與 360° 全景 AI 預警主機配合使用時,可自動檢測駕駛員四周視野盲區,出現車輛或移動物體時發出告警,通過喇叭提示,顯示動態軌跡,提供全天候無盲區車周實時畫面。?結合物體識別算法及智能 ADAS 物體識別算法,能實時處理車道線及車周物體,提前判別危險區域,...
-
渭南礦車盲區防碰撞預警怎么樣
由于工程車屬于大型車輛,具有車身長,駕駛位置高,軸距大等特點,車身周圍存在大片視覺盲區。工程車在作業過程中,單憑駕駛員視覺操作,那這些由車身引起的盲區就極大發生危險事故,在調查過程中顯示,很多事故造成大多是因為,周邊車輛人員不知不覺走進工程車盲區范圍內駕駛員看不到而引發,為此佳興偉誠科技研發出工程車四路BSD盲區防碰撞預警系統。工程車四路BSD盲區防碰撞預警系統,通過在工程車車身周圍各加裝一個BSD盲區偵測攝像頭來監測車身周圍的環境,經過算法處理在司機駕駛室內中控屏上呈現出一個四分割畫面,司機可以清楚地看到工程車車身周邊情況,完美的解決因工程車盲區問題。當工程車在作業時,車身周邊作業范圍闖入車...
-
烏海商用車前向防碰撞預警找哪家
裝載機作業時,因鏟斗、車身結構等因素存在較大盲區,在礦山、工地等復雜場景中,易與周邊的人員、其他工程車輛或堆放物發生碰撞。針對這一問題,裝載機盲區防碰撞預警系統應運而生,該系統由安裝在車身側面、后部的毫米波雷達和紅外傳感器,駕駛室內的液晶顯示屏及聲光報警裝置組成,可實時監測盲區范圍內的移動物體和固定障礙物。系統具備快速識別與分級預警功能,能將盲區目標的距離、類型等信息在顯示屏上清晰標注;當目標處于安全預警距離時,觸發一級預警,顯示屏對應區域亮起黃色燈光,同時發出 “盲區有目標,減速觀察” 的語音提示;若目標進入危險距離,立即啟動二級預警,紅色燈光快速閃爍,語音變為 “盲區緊急,立即停車”,并伴...
-
 昌吉工程車盲區防碰撞預警
昌吉工程車盲區防碰撞預警商用車因車身寬大、駕駛室位置高,存在較大的側方、后方盲區,在城市道路行駛或場站停靠時,易與非機動車、行人及小型車輛發生碰撞事故。商用車盲區防碰撞預警系統專為解決這一問題設計,由安裝在車身兩側后視鏡下方、尾部的毫米波雷達,車門立柱上的警示燈,駕駛室內的顯示屏及語音報警器組成,可實時監測盲區范圍內的移動物體。系統具備動態監測與分級預警功能,能將盲區目標的距離、運動軌跡等信息在顯示屏上直觀呈現;當目標處于較遠的預警區域時,觸發一級預警,對應側的車門立柱警示燈亮起黃色燈光,同時語音播報 “注意側方盲區”;若目標進入危險范圍,立即啟動二級預警,警示燈變為紅色并持續閃爍。工程車輛盲區防碰撞預警系統多少錢?...
-
牡丹江工程車防碰撞預警找哪家
處理層的技術則賦予了系統 “智慧”。圖像拼接算法如同一位技藝精湛的畫師,將多個攝像頭采集到的零散畫面巧妙地拼接成一幅完整、流暢的 360° 全景俯視圖。這個過程并非簡單的畫面組合,而是要精確處理畫面之間的銜接、畸變等問題,讓駕駛員看到的是一個真實、準確的車輛周邊環境圖像。目標檢測與追蹤算法通過對大量數據的深度學習,能夠迅速識別出各種目標物體,并持續追蹤它們的運動軌跡。它能夠根據目標的運動狀態,提前預判潛在的危險,為預警層提供可靠的決策依據。預警層是系統與駕駛員直接溝通的橋梁。車載顯示屏以直觀的方式呈現全景圖像和危險目標信息,紅框標注和距離顯示讓駕駛員一目了然。蜂鳴器和 LED 警示燈則通過聲音...
-
湘潭路橋工程車防碰撞預警設計
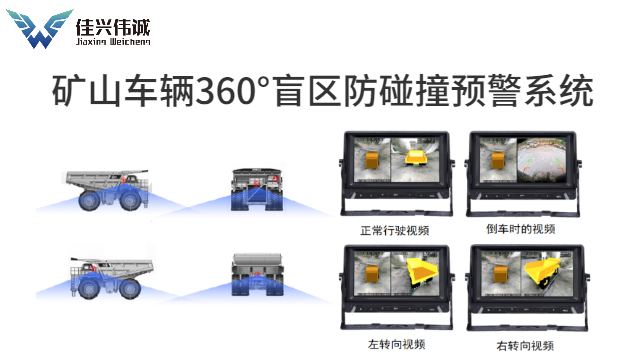
佳興偉誠的礦用自卸車防碰撞系統,是礦山運輸安全的堅實后盾。礦山環境惡劣,粉塵多、視線差,自卸車體型龐大,轉彎和倒車時極易引發碰撞。該系統搭載多組高抗干擾毫米波雷達,分別安裝在車頭、車身兩側及車尾,能準確探測 50 米范圍內的其他礦車、巖壁、渣堆等目標。當兩車距離小于安全閾值時,駕駛室內的顯示屏會實時顯示目標方位和距離,同時發出 “請注意前方車輛”“右側有障礙物” 等語音預警,聲光報警器也會相應閃爍。即使在暴雨、濃霧等極端天氣下,系統仍能穩定工作,通過算法過濾粉塵干擾,為礦用自卸車筑起一道全天候的安全防線,大幅降低礦山運輸事故率。礦車前向防碰撞預警系統通常由感知層、數據處理層、預警層三部分組成。...
-
甘南工程車防碰撞預警方案
公交車輛作為城市公共交通的重要組成部分,每天運載大量乘客,其運行安全直接影響著公眾的出行安全。佳興偉誠公交車輛360°全景防碰撞預警系統,致力于為公交出行保駕護航。系統能夠實時監測公交車輛前方、側方以及后方的交通狀況,對前方車輛急剎、行人突然橫穿馬路、側方車輛強行并線等情況進行準確識別和預警。當預警發生時,系統通過車內語音提示、儀表盤警示燈等方式提醒駕駛員采取措施,同時還能將預警信息反饋到公交調度中心,便于調度人員及時掌握車輛運行情況,做出合理調度安排,提升公交運營的安全性和可靠性,讓市民的公交出行更加安心。?工程車盲區 BSD防碰撞預警系統是針對工程車視野盲區引發的碰撞事故設計的安全輔助系統...
-
通遼防碰撞預警專賣
佳興偉誠的礦用自卸車防碰撞系統,是礦山運輸安全的堅實后盾。礦山環境惡劣,粉塵多、視線差,自卸車體型龐大,轉彎和倒車時極易引發碰撞。該系統搭載多組高抗干擾毫米波雷達,分別安裝在車頭、車身兩側及車尾,能準確探測 50 米范圍內的其他礦車、巖壁、渣堆等目標。當兩車距離小于安全閾值時,駕駛室內的顯示屏會實時顯示目標方位和距離,同時發出 “請注意前方車輛”“右側有障礙物” 等語音預警,聲光報警器也會相應閃爍。即使在暴雨、濃霧等極端天氣下,系統仍能穩定工作,通過算法過濾粉塵干擾,為礦用自卸車筑起一道全天候的安全防線,大幅降低礦山運輸事故率。佳興偉誠車輛前向防碰撞預警,如警惕哨兵,緊盯車輛前方,阻危險于萌芽...
-
 延安石油工程車防碰撞預警哪家好
延安石油工程車防碰撞預警哪家好處理層的技術則賦予了系統 “智慧”。圖像拼接算法如同一位技藝精湛的畫師,將多個攝像頭采集到的零散畫面巧妙地拼接成一幅完整、流暢的 360° 全景俯視圖。這個過程并非簡單的畫面組合,而是要精確處理畫面之間的銜接、畸變等問題,讓駕駛員看到的是一個真實、準確的車輛周邊環境圖像。目標檢測與追蹤算法通過對大量數據的深度學習,能夠迅速識別出各種目標物體,并持續追蹤它們的運動軌跡。它能夠根據目標的運動狀態,提前預判潛在的危險,為預警層提供可靠的決策依據。預警層是系統與駕駛員直接溝通的橋梁。車載顯示屏以直觀的方式呈現全景圖像和危險目標信息,紅框標注和距離顯示讓駕駛員一目了然。蜂鳴器和 LED 警示燈則通過聲音...
-
烏海汽車防撞防碰撞預警電話
佳興偉誠 360 全景防碰撞預警系統,匯聚前沿科技,為工程車安全作業筑牢根基,其技術水平在行業內處于先進地位。?其搭載的 AI 智能識別算法,經百萬級工程場景數據訓練,可準確分辨 10 余種目標物體,包括行人、電動車、挖掘機、墻體等,對行人的識別率高達 98%,哪怕在光線昏暗的隧道作業,依靠微弱的環境光,也能準確鎖定目標。配合每秒 20 次的高頻率毫米波雷達,實時探測 0.5 - 10 米內物體的距離與速度,數據誤差控制在 3 厘米以內。當危險臨近,系統立即發出分級預警:一級預警以 50 分貝的輕聲提示,二級預警則通過 75 分貝的急促蜂鳴與屏幕高頻閃爍,強制吸引駕駛員注意,為安全操作爭取寶貴...
-
綏化商用車盲區防碰撞預警定制
處理層的技術則賦予了系統 “智慧”。圖像拼接算法如同一位技藝精湛的畫師,將多個攝像頭采集到的零散畫面巧妙地拼接成一幅完整、流暢的 360° 全景俯視圖。這個過程并非簡單的畫面組合,而是要精確處理畫面之間的銜接、畸變等問題,讓駕駛員看到的是一個真實、準確的車輛周邊環境圖像。目標檢測與追蹤算法通過對大量數據的深度學習,能夠迅速識別出各種目標物體,并持續追蹤它們的運動軌跡。它能夠根據目標的運動狀態,提前預判潛在的危險,為預警層提供可靠的決策依據。預警層是系統與駕駛員直接溝通的橋梁。車載顯示屏以直觀的方式呈現全景圖像和危險目標信息,紅框標注和距離顯示讓駕駛員一目了然。蜂鳴器和 LED 警示燈則通過聲音...
-
 雙鴨山礦卡前向防碰撞預警系統
雙鴨山礦卡前向防碰撞預警系統佳興偉誠的防碰撞預警系統具備豐富且實用的功能。前向碰撞預警功能在當前車道一定范圍內,時刻判斷本車與前車之間的距離和相對速度,一旦存在潛在碰撞危險,便立即對駕駛者進行警告提醒,讓駕駛員能及時采取制動或避讓措施。車道偏離預警功能則時刻關注車輛行駛軌跡,當駕駛員因疏忽而偏離車道時,系統迅速采用燈光和聲音的方式發出報警,提醒駕駛員及時糾正方向,避免因偏離車道引發碰撞事故。佳興偉誠預警系統,防前撞、糾偏離,預警及時保安全。礦車前向防碰撞預警系統通過技術手段彌補了人工駕駛的不足,是礦山安全生產的重要保障。雙鴨山礦卡前向防碰撞預警系統礦山作為一個高危行業,其安全問題一直備受關注。而在礦山生產中,部分露天礦區...
-
長沙工程車輛行人防碰撞預警
礦山作業環境惡劣,道路崎嶇不平,車輛往來頻繁,粉塵彌漫導致視線受阻,車輛碰撞事故風險極高。佳興偉誠專門為礦山車輛打造的前后防碰撞預警系統,成為了礦山運輸安全的有力保障。該系統集成了先進的毫米波雷達與高精度傳感器。毫米波雷達能夠在惡劣天氣和復雜光線條件下正常工作,精確測量車輛前后方障礙物或其他車輛的距離、速度和角度信息。攝像頭則利用圖像識別技術,對監測區域內的物體進行準確分類和識別。通過智能算法對兩者數據深度融合分析,系統能提前預判潛在碰撞危險,并及時向駕駛員發出預警,降低了礦山車輛碰撞事故的發生率,助力礦山安全生產。?依靠超聲波傳感器的工程車防碰撞預警系統,可準確探測車輛盲區,讓司機提前知曉潛...
-
 銅川裝載車盲區防碰撞預警
銅川裝載車盲區防碰撞預警佳興偉誠 360 全景防碰撞預警系統,匯聚前沿科技,為工程車安全作業筑牢根基,其技術水平在行業內處于先進地位。?其搭載的 AI 智能識別算法,經百萬級工程場景數據訓練,可準確分辨 10 余種目標物體,包括行人、電動車、挖掘機、墻體等,對行人的識別率高達 98%,哪怕在光線昏暗的隧道作業,依靠微弱的環境光,也能準確鎖定目標。配合每秒 20 次的高頻率毫米波雷達,實時探測 0.5 - 10 米內物體的距離與速度,數據誤差控制在 3 厘米以內。當危險臨近,系統立即發出分級預警:一級預警以 50 分貝的輕聲提示,二級預警則通過 75 分貝的急促蜂鳴與屏幕高頻閃爍,強制吸引駕駛員注意,為安全操作爭取寶貴...
-
天津工程車前向防碰撞預警定制
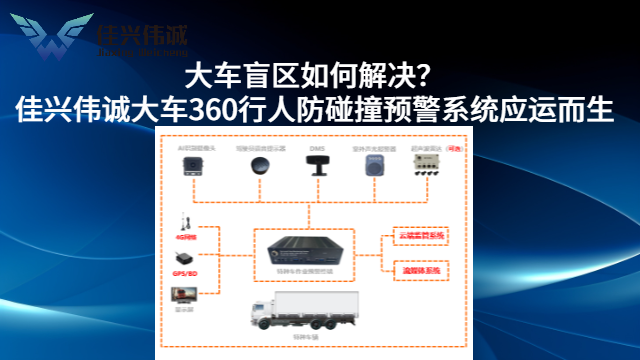
裝載機、鏟車、挖機等工程機械體型龐大,易產生視覺盲區。在光線差、噪聲大的惡劣環境中,后視鏡作用有限。尤其在水泥廠、混凝土公司,裝載機露天作業,廠區粉塵多、噪音大、人多車多、人車交互密集;礦山廠區環境更差,晝夜溫差大、礦塵多,視線受阻,加之其他工程機械多,裝載機盲區復雜,易發生碾壓事故,因此安裝車輛防碰撞預警系統很有必要。?隨著 AI 視覺技術發展,佳興偉誠科技將其融入 360 全景作業監控,實現 360 度工程車作業半徑內人員智能識別,可做到 6 路 AI 視覺盲區檢測。該系統搭配行人偵測攝像頭,運用 AI 算法實時智能偵測車身周邊及旋轉半徑內的作業人員,一旦偵測到,立即向司機發出警告,避免因...
-
漢中消防車防碰撞預警專賣
在實際應用場景中,車輛 360 全景盲區防碰撞預警系統表現出色。在建筑施工場地,挖掘機作業時,它可以監測車身兩側及后方的施工人員,防止在回轉過程中發生碰撞;起重機吊裝作業時,能避免吊臂下方或配重盲區的人員進入危險區域。在礦山與礦區,大型自卸車在狹窄道路轉彎、倒車時,系統能夠檢測周邊的礦車、行人或落石,保障運輸安全。在市政工程中,渣土車在城市道路行駛時,可重點監測右側盲區(該區域易發生行人事故);壓路機作業時,能避免碾壓周邊養護人員。在港口與物流園區,集裝箱卡車、叉車在裝卸區域,系統能夠識別周邊的搬運人員或堆垛障礙物,提高作業安全性。車輛 360 全景盲區防碰撞預警系統憑借技術優勢和廣泛的應用場...
-
 漢中工程車盲區防碰撞預警方案
漢中工程車盲區防碰撞預警方案佳興偉誠為小型貨運三輪車開發的 360 全景盲區防碰撞預警系統,在車頭、車尾及兩側貨箱安裝 4 個智能攝像頭,數據實時傳輸至車把中控的小型顯示屏。當三輪車穿梭在集市小巷,全景畫面可清晰呈現周圍攤位、行人,若與兩側物體距離小于 40 厘米,系統自帶的蜂鳴器會發出 “注意側方碰撞” 的提示音,同時顯示屏對應區域閃爍紅光。該系統所有組件統一供電,通過攝像頭、顯示屏與蜂鳴器聯動,不涉及三輪車的動力系統,讓商販在密集人流中送貨更穩妥。商用車BSD盲區防碰撞預警系統融合多傳感器數據,準確識別行人,分級預警,為駕駛員提供清晰避險指引。漢中工程車盲區防碰撞預警方案佳興偉誠 360 度全景防碰撞預警系統(又稱車...
-
石油工程車防碰撞預警多少錢
佳興偉誠的礦用自卸車防碰撞系統,是礦山運輸安全的堅實后盾。礦山環境惡劣,粉塵多、視線差,自卸車體型龐大,轉彎和倒車時極易引發碰撞。該系統搭載多組高抗干擾毫米波雷達,分別安裝在車頭、車身兩側及車尾,能準確探測 50 米范圍內的其他礦車、巖壁、渣堆等目標。當兩車距離小于安全閾值時,駕駛室內的顯示屏會實時顯示目標方位和距離,同時發出 “請注意前方車輛”“右側有障礙物” 等語音預警,聲光報警器也會相應閃爍。即使在暴雨、濃霧等極端天氣下,系統仍能穩定工作,通過算法過濾粉塵干擾,為礦用自卸車筑起一道全天候的安全防線,大幅降低礦山運輸事故率。大型車輛防碰撞預警系統采用高清攝像頭,能清晰捕捉車輛周圍圖像,為司...
-
渭南商用車盲區防碰撞預警多少錢
大型車輛因體型龐大、車身結構復雜,存在側方、后方及車頭下方盲區,在公路行駛、廠區作業或港口轉運等場景中,易與行人、小型車輛、作業設備發生碰撞事故。大型車輛盲區防碰撞預警系統應運而生,該系統由分布在車身四周的毫米波雷達、高清攝像頭、超聲波傳感器,駕駛室內的多功能顯示屏及聲光報警裝置組成,可實時監測盲區中的移動物體和固定障礙物。系統具備準確識別、動態追蹤與多級預警功能,能將盲區目標的距離、速度、類型等信息在顯示屏上清晰呈現并同步更新;當目標處于安全預警范圍時,觸發一級預警,對應盲區方向的車身警示燈亮起黃色燈光,同時語音播報 “盲區有物體,請注意”;若目標進入危險范圍,立即啟動二級預警,警示燈變為紅...
-
銅川北斗5G防碰撞預警定制
車輛360全景盲區防碰撞預警系統智能目標識別也是其優勢。通過 AI 算法,系統能夠準確區分 “行人”“固定障礙物”“移動車輛” 等不同目標,減少了誤報情況。例如,在復雜的施工場地中,它能夠判斷哪些是真正具有危險的移動物體,而排除樹木、土堆等非危險目標,避免駕駛員因頻繁誤報而產生困擾,從而更專注于應對實際的危險情況。實時性強是該系統的又一特點。從圖像采集到預警響應的延遲時間小于 200ms,這對于工程車輛在低速作業(0 - 30km/h)時的實時監控需求來說,至關重要。在挖掘機回轉、裝載機卸料等瞬間,系統能夠迅速捕捉到周圍環境的變化,并及時發出預警,為駕駛員爭取寶貴的反應時間,有效避免碰撞事故的...
-
錫林郭勒大型車輛盲區防碰撞預警多少錢
工程車的 “視線死角” 成因復雜,或因車身結構遮擋,如混凝土攪拌車的旋轉筒擋住右側 3-5 米范圍;或因作業環境復雜,像礦山工地的粉塵會讓能見度降至 5 米以下。佳興偉誠盲區防碰撞預警系統憑借先進技術,成為解決問題的關鍵。?其搭載的激光雷達掃描頻率達 10Hz,可測量 0.3-10 米內障礙物距離,誤差不超過 5 厘米;配合紅外攝像頭,在夜間無光環境中也能清晰成像,識別行人準確率達 95%。數據經車載芯片 0.1 秒快速處理后,以彩色標注的方式在顯示屏呈現,讓原本的 “盲區” 變得透明可見,技術實力為安全保駕護航。車輛盲區防碰撞預計系統結合電子地圖,系統識別施工區域邊界,接近時提前預警,防止工...
-
臨夏工程車盲區防碰撞預警廠家
在礦山作業中,車輛運輸對生產流程順暢至關重要,但礦山路況復雜、車輛多,且灰塵多、視線差,車輛碰撞事故風險高。為此,佳興偉誠推出礦山車輛前后防碰撞預警系統,為礦山運輸安全提供可靠技術保障。?該系統采用先進的傳感器融合技術,集成毫米波雷達與高精度傳感器。毫米波雷達能全天候工作,不受惡劣天氣和光線影響,準確測量車輛前后方障礙物或其他車輛的距離、速度和角度;攝像頭通過圖像識別對監測區域物體分類識別。再經傳感器融合算法深度融合兩者數據,實現對車輛周邊環境的準確感知。?同時,系統運用深度學習和人工智能算法,實時分析傳感器數據。通過學習大量礦山場景數據,識別不同危險情況并分級;還能計算本車與前后方目標的相對...
-
拉薩汽車防撞防碰撞預警找哪家
環衛車在城市道路上作業,清掃、清運時常常需要停靠路邊,周圍行人、非機動車穿梭,環境復雜。佳興偉誠的環衛車防碰撞預警系統,為環衛工的安全保駕護航。系統在環衛車的清掃裝置兩側、車尾及駕駛室側方安裝傳感器,能監測 3 米至 10 米范圍內的目標。當有行人靠近正在作業的清掃裝置,系統會發出 “作業區域有行人,請注意” 的語音預警;當環衛車停靠路邊準備清運垃圾時,若有非機動車從后方駛來,車尾的雷達會及時探測到,駕駛室內的報警燈亮起,同時語音提醒 “后方有車輛靠近,注意開門安全”。該系統還具備夜間模式,在光線不足時仍能快速識別目標,讓環衛作業全天候安全無憂。車輛防碰撞預警系統不受天氣(如雨、霧)和光照影響...
-
烏魯木齊特種車盲區防碰撞預警專賣
工程車作業范圍大,駕駛員視覺盲區大,且現場噪音易導致其注意力分散、判斷力降低,作業危險系數高,如何防患于未然、降低風險是主管部門的探索方向。由于工程車作業人員 95% 以上的環境和車輛狀態信息通過視覺感知,因此解決工程車輛等安全問題、降低作業風險,應從提升視覺感知入手。佳興偉誠工程車輛盲區防碰撞預警系統,基于視覺算法,專為工程車、渣土車等重型車輛設計。它通過 360 全景盲區預警系統、車載 AI 視覺攝像頭、車內顯示器、聲光報警器,對靠近的行人、非機動車進行圖像采集、智能識別和預警提示。當系統監測到車輛右側有其他工程車輛或作業人員進入作業范圍,車內顯示器會立即放大右側畫面,輔助駕駛員提升視覺感...