山西堆取料機無人值守系統自動化測繪
堆取料機無人值守系統通過激光掃描技術實現料場內堆料與取料的自動化管理。安裝于堆料機懸臂或門架上的掃描儀以扇形方式進行實時掃描,捕捉料堆的三維形態,減少盲區,確保數據完整。采集的三維數據經過處理后,形成具體的料堆信息數據庫,作為堆料和取料操作的基礎。結合PLC控制系統,作業計劃被轉換為具體的控制指令,指導堆取料機完成自動尋址和動作執行。堆料階段,系統依據預設的堆形、堆寬和堆高參數,控制設備的懸臂俯仰、回轉及大車移動,實現堆料的精確布置;取料階段,系統自動確定切入點,調整刮板速度和俯仰角度,保持取料流量的穩定。雷達料位檢測配合定位識別系統,輔助設備負載判斷和定位協調。安全防護通過毫米波和超聲波雷達監測,降低碰撞風險。整套系統利用工業以太網和現場總線實現高效數據通信,構建智能化的堆場管理環境。上海諾尚信息技術有限公司自2005年起,專注于工業物聯網集成,憑借成熟的激光掃描與PLC控制技術,為煤礦、火電廠及大型料場提供智能無人值守堆取料解決方案,支持客戶提升作業效率及安全管理,降低運營成本。數字化集成使堆取料機無人值守系統能夠實時分析煤場數據,優化堆取流程并減少能源消耗。山西堆取料機無人值守系統自動化測繪

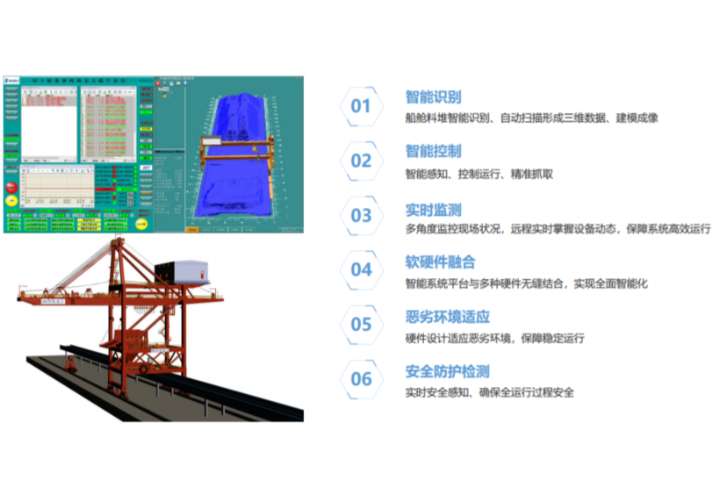
在數字化堆取料機無人值守系統中,仿真處理技術承擔了作業控制和優化的關鍵功能。系統通過激光掃描儀對料堆進行動態掃描,收集大量點云數據,形成包含邊界、起止點等關鍵坐標的三維幾何模型。隨后,借助自主開發的軟件平臺,對數據進行歸一化和分類管理,確保其準確性與實時更新。基于OpenGL圖形庫,三維繪圖技術將靜態模型與實時數據相結合,生成反映料堆形態變化的三維動畫。仿真處理不僅展示空間結構,還通過算法計算堆料起止位置、取料切入點及路徑規劃等作業參數。仿真結果與PLC控制系統緊密配合,實現對堆取料機機構的精確驅動,自動調整懸臂俯仰角、回轉角度和行走距離,保證作業的連續性和效率。系統能夠實時刷新三維模型,反映作業過程中料堆形態的變化,支持作業計劃的動態調整。上海諾尚信息技術有限公司依托技術積累和創新能力,打造了具備高度仿真處理能力的數字化無人值守系統,推動料場作業數字孿生管理,促進堆取料自動化和智能化發展,降低運維風險及人力投入。山西堆取料機無人值守系統自動化測繪在煤場動態監控中,堆取料機無人值守系統實時掌控作業狀態,科學指導流程,保障生產連續性與整體安全性。

圓形堆取料機無人值守系統由多個功能模塊組成,旨在實現散貨料場堆料與取料作業的自動控制。系統涵蓋激光掃描模塊、料位檢測模塊、斗輪機定位識別模塊、安全防護模塊、無線通信模塊、高精度視頻監控模塊、軟件架構以及程控PLC控制模塊。激光掃描模塊負責實時獲取料堆的三維形態數據,為自動化操作提供空間支持。料位檢測模塊利用雷達傳感器測量設備與物料之間的距離,輔助判斷設備負荷及料堆高度,確保操作精確。斗輪機定位識別模塊采用格雷母線編碼技術,實現機械定位的準確識別,保障動作協調。安全防護模塊配備緊急停止裝置及毫米波、超聲波雷達,用于防止設備碰撞并保障人員安全。無線通信模塊搭建穩定網絡環境,支持遠程視頻監控與數據傳輸,確保系統響應及時。高精度視頻監控模塊覆蓋關鍵設備部位,提供運行狀態監控。軟件架構采用客戶端/服務器模式,結合三維圖形繪制與數據處理,實現料場數字化仿真與控制。程控PLC控制模塊作為指令中心,將作業計劃轉化為具體控制命令,協調各模塊的協作運行。上海諾尚信息技術有限公司依托行業經驗和自主研發能力,結合完善的服務體系,已為多家煤礦及電廠客戶提供定制化無人值守系統,助力提升生產效率與安全管理水平。
大型料場堆取料機無人值守系統由兩個關鍵組成部分構成:堆取料機信息采集系統和中控室控制系統。信息采集系統整合了激光掃描檢測、工業視頻監控、GPS定位及編碼定位裝置,協同捕捉料堆的三維形態及設備姿態,提供對周邊環境的監測。激光掃描儀安裝于堆料機門架或懸臂,采用扇形掃描方式,動態反映料堆變化,輔助精確作業。料位檢測通過雷達傳感器實時測量設備與物料間的距離,輔助控制堆取料機動作。定位系統基于格雷母線方案,利用電子編碼器及電磁發射器實現設備位置的高精度追蹤,保障運行軌跡的準確。安全防護部分包括急停按鈕、毫米波及超聲波雷達,確保人員與設備的安全,減少碰撞風險。軟件架構采用C/S模式,基于C++和OpenGL開發,支持三維圖形繪制及實時數據融合,構建動態仿真界面。程控PLC控制系統負責將采集數據轉化為控制指令,管理設備動作及運行狀態。上海諾尚信息技術有限公司依托深厚技術積累及科研合作,推動數字化料場無人值守系統在多個大型煤場的應用,助力客戶提升生產效率與安全管理水平。公司致力于為行業客戶提供智能自動化解決方案,促進產業轉型升級。通過數字化平臺遠程調度,堆取料機無人值守系統操作簡便,減少現場人員干預,提升管理便捷度與響應速度。
自動作業堆取料機無人值守系統的軟件架構設計強調高效的數據處理與實時控制的緊密結合。系統采用面向對象的開發模式,基于C/S架構,使用C++語言構建,運行于Windows平臺。三維圖形部分利用OpenGL圖形庫,支持料堆及堆取料機動態三維模型的流暢渲染。系統通過TCP/IP Socket與激光掃描設備實現數據交換,GPS及角度位移編碼器通過以太網連接,串口服務器則擴展了通訊能力,確保多種設備數據能夠實時傳輸與處理。ActiveX控件封裝了3D繪圖功能,便于調用與跨平臺應用。軟件內部設計了自定義數據地圖模式,對掃描數據進行歸一化處理,使掃描點得到準確分類,動態反映料堆形態變化。界面允許調整網格密度,以平衡圖形細節與系統運行效率,避免系統負載過高。整體架構融合了工業自動化與數字孿生技術,支持多機協同作業及防沖撞邏輯,保障無人值守環境下的穩定與安全。上海諾尚信息技術有限公司提供包括數字化料場無人值守系統在內的多項智能解決方案,憑借專業團隊和完善服務,諾尚致力于成為煤礦電力行業智能化進步的可靠合作伙伴。堆取料機無人值守系統結合激光掃描圖像,清晰展示操作范圍和堆煤形態,助力管理人員優化調度策略。浙江堆取料機無人值守系統AI視覺多少錢
應用效果顯示堆取料機無人值守系統助力發電集團實現數據自動采集和動態管理,提升燃煤利用率。山西堆取料機無人值守系統自動化測繪
在大型料場及煤礦作業中,自動化控制技術對提升堆取料機的作業效率和安全管理具有實際意義。PLC控制指令作為無人值守系統的關鍵技術,承擔著將復雜的作業規劃轉換為具體機械操作的職責。系統通過配置在輸煤程控室的PLC控制單元,能夠精確地控制堆取料機的懸臂俯仰角、回轉角度以及大車的定位行走。實時數據由激光掃描儀和位置編碼器采集,經過程序模塊處理,生成與堆形、堆寬和堆高等參數相匹配的控制命令,確保機械動作與現場物料形態協調一致。數據傳輸采用工業以太網及光纖通信技術,保障信息交換的穩定性和可靠性。系統支持多種操作模式,包括遠程手動和自動堆取料,適應不同生產需求。安全機制方面,PLC指令中集成了急停和防撞邏輯,增強設備及人員安全保障。該智能控制單元使堆取料機能夠自動定位料堆并執行堆取料任務,減少人工干預,降低操作風險,提高作業連續性和精確度。上海諾尚信息技術有限公司結合自動化控制與通信技術優勢,開發了符合行業標準的無人值守系統,致力于為煤礦、電力及大型料場客戶提供包含PLC控制指令在內的整體解決方案,支持生產智能化轉型和安全水平提升。山西堆取料機無人值守系統自動化測繪
上海諾尚信息技術有限公司匯集了大量的優秀人才,集企業奇思,創經濟奇跡,一群有夢想有朝氣的團隊不斷在前進的道路上開創新天地,繪畫新藍圖,在上海市等地區的安全、防護中始終保持良好的信譽,信奉著“爭取每一個客戶不容易,失去每一個用戶很簡單”的理念,市場是企業的方向,質量是企業的生命,在公司有效方針的領導下,全體上下,團結一致,共同進退,**協力把各方面工作做得更好,努力開創工作的新局面,公司的新高度,未來上海諾尚信息供應和您一起奔向更美好的未來,即使現在有一點小小的成績,也不足以驕傲,過去的種種都已成為昨日我們只有總結經驗,才能繼續上路,讓我們一起點燃新的希望,放飛新的夢想!
- 上海堆取料機無人值守系統自動化控制臺 2025-12-15
- 山東數字煤場管控系統大型料場性價比 2025-12-15
- 新疆軟件工業安全監測系統 2025-12-15
- 浙江室內輪式升降巡檢機器人溫濕度檢測怎么用 2025-12-15
- 集成平臺PLC聯機工業安全監測系統 2025-12-14
- 河南工業安全監測系統料場紅外溫度自動報表生成 2025-12-14
- 大數據分析工作原理智能巡檢系統 2025-12-14
- 上海工業安全監測系統煤炭轉運性價比 2025-12-14
- 河南工業安全監測系統燃煤電廠在線監測 2025-12-14
- 陜西工業安全監測系統煙霧濃度應用效果 2025-12-14
- 上海應用圖紙加密軟件設施 2025-12-15
- 北京沖壓機安全光幕廠家 2025-12-15
- 青浦區國內云客服現價 2025-12-15
- 無錫個人防爆風機情況 2025-12-15
- 松江區附近大模型智能客服服務熱線 2025-12-15
- 云南新款安全教育交互體感設備包括什么 2025-12-15
- 上海亞洲款安全眼鏡廠家 2025-12-15
- 上海堆取料機無人值守系統自動化控制臺 2025-12-15
- 電子圍欄哪個品牌好 2025-12-15
- 吉林購物中心人員檢測生產廠家 2025-12-15