安徽哪里有圖像標(biāo)注哪里買
在很長一段時(shí)間內(nèi),傳統(tǒng)的糧庫害蟲檢查方法是依靠人工巡檢,用肉眼觀察,逐倉篩查的方法,這種方法覆蓋面不足且效率低下,篩查一次將耗費(fèi)工作人員的大量時(shí)間精力。隨著技術(shù)的發(fā)展,AI化的篩查逐步采用,通過算法的AI識(shí)別實(shí)現(xiàn)自動(dòng)化篩查。方法基于高像素高清攝像機(jī),實(shí)時(shí)遠(yuǎn)程監(jiān)控糧庫,一旦發(fā)現(xiàn)害蟲就能夠立即向管理平臺(tái)發(fā)出告警,有效降低巡檢成本和壓力,提升工作效率。這之中,實(shí)現(xiàn)AI識(shí)別處理的傳感器同樣重要,面對(duì)復(fù)雜的糧庫環(huán)境,一個(gè)高性能能夠快速處理數(shù)據(jù)的圖像處理板是關(guān)鍵。SpeedDP是長期授權(quán)嗎?安徽哪里有圖像標(biāo)注哪里買
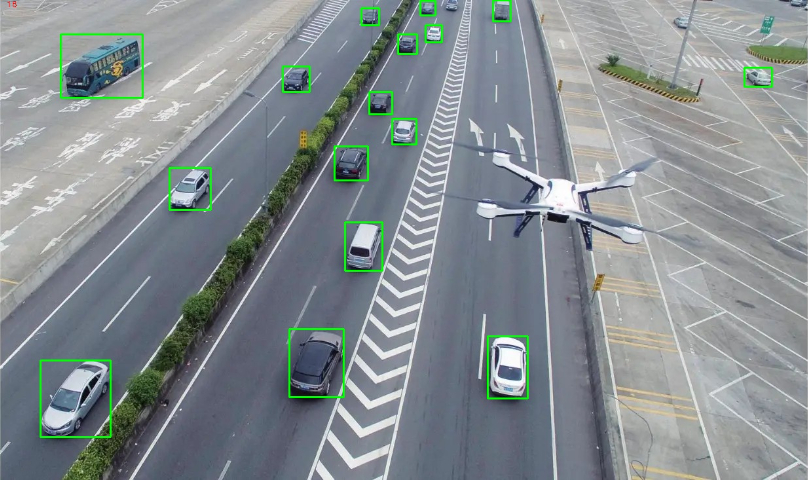
在如今的作業(yè)中,無人機(jī)路面巡查替代傳統(tǒng)的人工巡查,展現(xiàn)出巨大的效率優(yōu)勢(shì)。像高速施工工地這樣的環(huán)境下,施工方為了保障施工安全,就需要對(duì)施工范圍進(jìn)行嚴(yán)格管控,傳統(tǒng)的人工巡查效率低,受限于地形、時(shí)間等問題,容易出現(xiàn)盲點(diǎn)。相比人工,利用無人機(jī)進(jìn)行AI識(shí)別則可以逐幀圖像監(jiān)測(cè),即便是夜晚也能夠利用紅外傳感器進(jìn)行數(shù)據(jù)收集,幾乎不會(huì)遺漏任何信息。而交通管理部門,則可以利用無人機(jī)快速到底事故地點(diǎn)進(jìn)行疏導(dǎo),緩解交通壓力。貴州快速圖像標(biāo)注什么價(jià)格SmartDP只需要少量樣本即可。

“啟明935A”系列芯片已經(jīng)成功點(diǎn)亮,并完成各項(xiàng)功能性測(cè)試,達(dá)到車規(guī)級(jí)量產(chǎn)標(biāo)準(zhǔn)。啟明935A是行業(yè)首顆基于Chiplet(芯粒/小芯片)異構(gòu)集成范式的自動(dòng)駕駛芯片,但并非單一芯片,而是一個(gè)家族系列。啟明935HUBChiplet可以和不同數(shù)量的大熊星座AIChiplet互相搭配,再結(jié)合靈活的封裝方式,快速形成不同性能等級(jí)的SoC芯片。它還支持高帶寬的PBLink多芯互連,雙芯雙向帶寬128GB/s,四芯雙向帶寬64GB/s。啟明935A每顆芯片都支持比較大20路的1080p60攝像頭輸入,可應(yīng)用于各類端側(cè)AI部署。得益于大熊星座NPU天然支持Transformer結(jié)構(gòu),初步支持的模型有Yolo系列、ResNet50、PSPNet、PointNet++、TrafficSign_Retinanet、BevDet、miniCPM、Unet_ResNet50、PointPillars、PillarNest、M2track、BevFusion、PaliGemma、LLaMa-3B、8B等等。
YOLO系列算法是目標(biāo)識(shí)別領(lǐng)域很重要的技術(shù)之一,因?yàn)樾阅軓?qiáng)大、消耗算力較少,一直以來都是實(shí)時(shí)目標(biāo)檢測(cè)領(lǐng)域的主要范式。該框架被大量用于各種實(shí)際應(yīng)用,包括自動(dòng)駕駛、監(jiān)控和物流等行業(yè)的目標(biāo)識(shí)別。自今年2月YOLOv9發(fā)布以后,近期,清華又推出了YOLOv10,作為計(jì)算機(jī)視覺領(lǐng)域的突破性框架,具備實(shí)時(shí)的端到端目標(biāo)檢測(cè)能力,通過提供結(jié)合效率和準(zhǔn)確性的強(qiáng)大解決方案,延續(xù)了YOLO系列的傳統(tǒng)。據(jù)悉,YOLOv10在各種模型規(guī)模上都實(shí)現(xiàn)了SOTA性能和效率。例如,YOLOv10-S在COCO上的類似AP下比RT-DETR-R18快1.8倍,同時(shí)參數(shù)數(shù)量和FLOP大幅減少。與YOLOv9-C相比,在性能相同的情況下,YOLOv10-B的延遲減少了46%,參數(shù)減少了25%。遇到的項(xiàng)目不常見,算法開發(fā)怎么辦?

YOLO系列算法目前更新到Y(jié)OLOv8。Yolo系列算法是典型的onestage算法,同樣,在算法設(shè)計(jì)上也注重目標(biāo)區(qū)域的檢測(cè)以及特征的分類,這里目標(biāo)區(qū)域的檢測(cè)采用的是和圖像區(qū)域分類定位的方式實(shí)現(xiàn)的。Yolo系列算法是一種比較成熟的目標(biāo)檢測(cè)算法框架,基于這種框架的算法還在不斷地迭代中,當(dāng)然解決的問題也越來越細(xì)化,比如候選區(qū)精度、比如小尺度檢測(cè)等。基本上YoloV3及以上版本的算法可以在很多場(chǎng)景下得到現(xiàn)實(shí)應(yīng)用。2023年1月,目標(biāo)檢測(cè)經(jīng)典模型YOLO系列再添一個(gè)新成員YOLOv8,這是Ultralytics公司繼YOLOv5之后的又一次重大更新。YOLOv8一經(jīng)發(fā)布就受到了業(yè)界的廣關(guān)注,成為了這幾天業(yè)界的流量擔(dān)當(dāng)。量化感知 訓(xùn)練技術(shù)是SpeedDP的一大亮點(diǎn)。四川圖像標(biāo)注產(chǎn)品
SpeedDP支持 多個(gè)YOLO 模型(YOLOX、YOLOv8、YOLOv10、YOLO11、YOLO12),用戶能夠根據(jù)需求選擇適合的算法。安徽哪里有圖像標(biāo)注哪里買
這種智慧化的建設(shè)就是采用圖像處理。在無人機(jī)內(nèi)部安裝圖像處理板,這些圖像處理板和相機(jī)、算法的有機(jī)結(jié)合就形成了無人機(jī)的智慧眼,有了這個(gè)智慧眼,無人機(jī)就能夠?qū)σ曇胺秶鷥?nèi)的物體進(jìn)行AI識(shí)別,從而自動(dòng)完成避障、巡檢等操作。成都慧視開發(fā)的小型化圖像處理板Viztra-LE026就是專門為無人機(jī)設(shè)計(jì)的一款“智慧眼”處理器。這塊板卡采用了RV1126開發(fā)而成,具備2.0TOPS的算力,外形呈圓形化設(shè)計(jì),整體外觀大小為Ф38mm*12mm,重量只有12g,功耗不高于4W,用在無人機(jī)領(lǐng)域具有功耗低、尺寸小的優(yōu)勢(shì),不會(huì)過多占用和消耗無人機(jī)的內(nèi)部空間和續(xù)航。安徽哪里有圖像標(biāo)注哪里買
- 海南國產(chǎn)目標(biāo)識(shí)別供應(yīng)商 2025-12-16
- 深度學(xué)習(xí)AI智能視覺 2025-12-16
- 陜西RK3399開發(fā)板圖像識(shí)別模塊提供商 2025-12-16
- 遼寧人臉識(shí)別圖像識(shí)別模塊解決方案 2025-12-16
- 四川圖像識(shí)別模塊識(shí)別 2025-12-16
- 四川自主研發(fā)圖像識(shí)別模塊專業(yè)團(tuán)隊(duì) 2025-12-16
- 遼寧應(yīng)急救援AI智能提供商 2025-12-16
- 湖南數(shù)據(jù)目標(biāo)識(shí)別24小時(shí)服務(wù) 2025-12-15
- 天津人防目標(biāo)識(shí)別系統(tǒng) 2025-12-15
- 江西RV1126處理板圖像識(shí)別模塊人工智能芯片 2025-12-15
- 珠海耳機(jī)骨傳導(dǎo)振子價(jià)格 2025-12-16
- 佛山rj水晶頭 2025-12-16
- 無錫哪里有物聯(lián)網(wǎng)設(shè)備近期價(jià)格 2025-12-16
- 越城區(qū)辦公用在線商城開發(fā)聯(lián)系人 2025-12-16
- 江蘇自動(dòng)化測(cè)試模組優(yōu)勢(shì) 2025-12-16
- 徐州如何無線通信廠家報(bào)價(jià) 2025-12-16
- 吳江區(qū)特種毫米波測(cè)風(fēng)雷達(dá)現(xiàn)貨 2025-12-16
- 云浮輔聽骨傳導(dǎo)振子種類 2025-12-16
- 泉州SL2M數(shù)字對(duì)講機(jī) 2025-12-16
- 智能gps定位器價(jià)格 2025-12-16